Go Sync Mutex:正常模式和饥饿模式
来源:dev.to
时间:2024-09-06 09:54:59 198浏览 收藏
从现在开始,努力学习吧!本文《Go Sync Mutex:正常模式和饥饿模式》主要讲解了等等相关知识点,我会在golang学习网中持续更新相关的系列文章,欢迎大家关注并积极留言建议。下面就先一起来看一下本篇正文内容吧,希望能帮到你!
这是帖子的摘录;完整的帖子可以在这里找到:golang sync mutex:正常和饥饿模式。
互斥体,或 mut双 ex包含,在 go 中基本上是一种确保一次只有一个 goroutine 干扰共享资源的方法。该资源可以是一段代码、一个整数、一个映射、一个结构、一个通道或几乎任何东西。
现在,上面的解释并不是严格的“学术”定义,但它是理解这个概念的有用方法。
在今天的讨论中,我们仍然从问题出发,转向解决方案,然后深入探讨它实际上是如何组合在一起的。
为什么我们需要sync.mutex?
如果你花了足够的时间在 go 中摆弄地图,你可能会遇到像这样的令人讨厌的错误:
fatal error: concurrent map read and map write
发生这种情况是因为我们没有保护我们的映射免受多个 goroutine 试图同时访问和写入的影响。
现在,我们可以使用带有互斥锁或sync.map的映射,但这不是我们今天的重点。这里的明星是sync.mutex,它有三个主要操作:lock、unlock 和 trylock(我们现在不会讨论)。
当一个 goroutine 锁定一个互斥锁时,它基本上是在说,“嘿,我要使用一下这个共享资源”,并且所有其他 goroutine 都必须等待直到互斥锁被解锁。一旦完成,它应该解锁互斥体,以便其他 goroutine 可以轮到他们。
就这么简单,让我们通过一个简单的反例来看看它是如何工作的:
var counter = 0
var wg sync.waitgroup
func incrementcounter() {
counter++
wg.done()
}
func main() {
for i := 0; i < 1000; i++ {
wg.add(1)
go incrementcounter()
}
wg.wait()
fmt.println(counter)
}
所以,我们有了这个在 1000 个 goroutine 之间共享的计数器变量。 go 新手可能会认为结果应该是 1000,但事实并非如此。这是因为所谓的“竞争条件”。
当多个 goroutine 尝试在没有适当同步的情况下同时访问和更改共享数据时,就会发生竞争情况。在这种情况下,增量操作 (counter++) 不是原子的。
由多个步骤组成,下面是 arm64 架构下 counter++ 的 go 汇编代码:
movd main.counter(sb), r0 add $1, r0, r0 movd r0, main.counter(sb)
counter++ 是一个读取-修改-写入操作,上面的这些步骤不是原子的,这意味着它们不是作为单个、不间断的操作执行的。
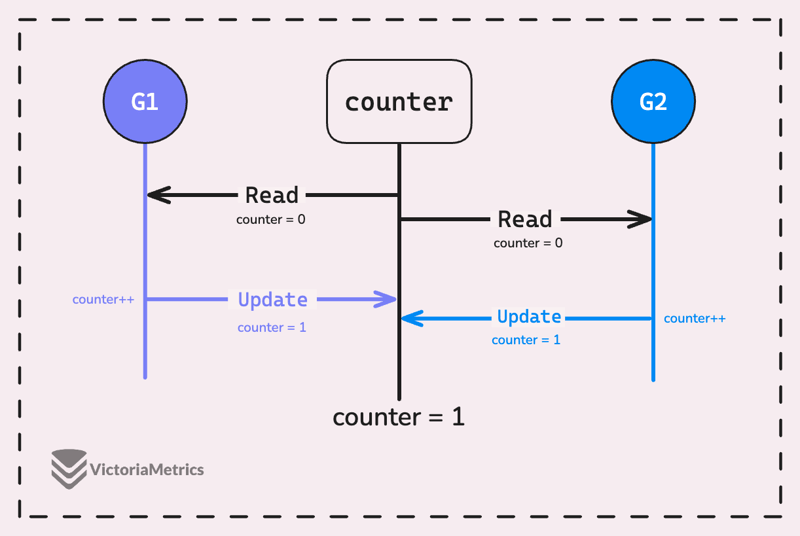
例如,goroutine g1 读取 counter 的值,在写入更新值之前,goroutine g2 读取相同的值。然后两者都将更新后的值写回,但由于它们读取的是相同的原始值,因此实际上丢失了一个增量。
使用atomic包是解决这个问题的好方法,但今天让我们重点讨论互斥体如何解决这个问题:
var counter = 0
var wg sync.waitgroup
var mutex sync.mutex
func incrementcounter() {
mutex.lock()
counter++
mutex.unlock()
wg.done()
}
func main() {
for i := 0; i < 1000; i++ {
wg.add(1)
go incrementcounter()
}
wg.wait()
fmt.println(counter)
}
现在,结果是 1000,正如我们预期的那样。在这里使用互斥锁非常简单:用 lock 和 unlock 包装关键部分。但要小心,如果你在一个已经解锁的互斥体上调用 unlock,将会导致致命错误同步:解锁已解锁的互斥体。
通常最好使用 defer mutex.unlock() 来确保解锁发生,即使出现问题也是如此。我们还有一篇关于 golang defer:从基础到陷阱的文章。
另外,你可以通过运行runtime.gomaxprocs(1)将gomaxprocs设置为1,结果在1000时仍然是正确的。这是因为我们的goroutines不会并行运行,而且函数足够简单运行时被抢占。
互斥体结构:剖析
在我们深入了解 go 的sync.mutex 中的锁定和解锁流程如何工作之前,让我们先分解一下互斥体本身的结构或解剖结构:
package sync
type mutex struct {
state int32
sema uint32
}
go 中的互斥锁的核心有两个字段:state 和 sema。它们可能看起来像简单的数字,但它们的内涵远不止表面上看到的那样。
状态字段是一个 32 位整数,显示互斥体的当前状态。它实际上被分为多个位,对有关互斥体的各种信息进行编码。
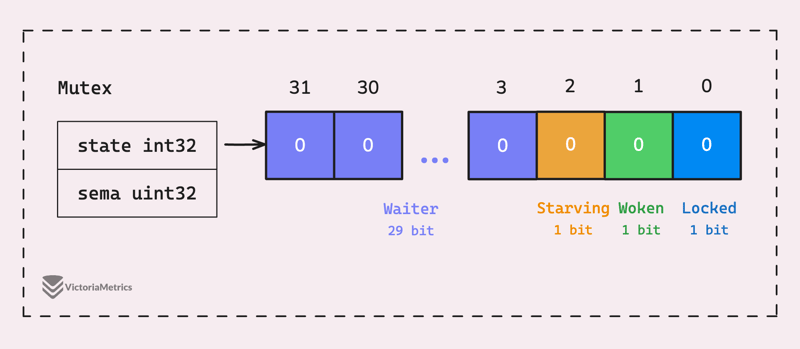
让我们从图像中总结一下状态:
- locked(位0):互斥锁当前是否被锁定。如果设置为 1,则互斥体被锁定,其他 goroutine 无法获取它。
- woken(位 1):如果任何 goroutine 已被唤醒并尝试获取互斥锁,则设置为 1。其他 goroutine 不应在不必要的情况下被唤醒。
- 饥饿(位 2):该位显示互斥锁是否处于饥饿模式(设置为 1)。我们稍后将深入探讨此模式的含义。
- waiter(位 3-31):其余位跟踪有多少 goroutines 正在等待互斥体。
另一个字段 sema 是一个 uint32,充当信号量来管理等待的 goroutine 并发出信号。当互斥锁被解锁时,等待的 goroutine 之一被唤醒以获取锁。
与状态字段不同,sema 没有特定的位布局,而是依赖运行时内部代码来处理信号量逻辑。
互斥锁流程
在mutex.lock函数中,有两条路径:通常情况下的快速路径和处理异常情况的慢速路径。
func (m *mutex) lock() {
// fast path: grab unlocked mutex.
if atomic.compareandswapint32(&m.state, 0, mutexlocked) {
if race.enabled {
race.acquire(unsafe.pointer(m))
}
return
}
// slow path (outlined so that the fast path can be inlined)
m.lockslow()
}
快速路径被设计得非常快,并且预计可以处理大多数尚未使用互斥体的锁定获取。该路径也是内联的,这意味着它直接嵌入到调用函数中:
$ go build -gcflags="-m" ./main.go:13:12: inlining call to sync.(*mutex).lock ./main.go:15:14: inlining call to sync.(*mutex).unlock
仅供参考,这个内联快速路径是一个巧妙的技巧,利用了 go 的内联优化,并且在 go 的源代码中被大量使用。
当快速路径中的 cas(比较和交换)操作失败时,这意味着状态字段不为 0,因此互斥体当前被锁定。
这里真正关心的是慢速路径 m.lockslow,它完成了大部分繁重的工作。我们不会太深入地研究源代码,因为它需要大量有关 go 内部工作原理的知识。
我将讨论该机制,也许还有一些内部代码,以使事情变得清晰。在慢速路径中,goroutine 不断主动旋转以尝试获取锁,它不会直接进入等待队列。
“旋转是什么意思?”
自旋意味着 goroutine 进入紧密循环,在不放弃 cpu 的情况下反复检查互斥体的状态。
在这种情况下,它不是一个简单的 for 循环,而是执行旋转等待的低级汇编指令。让我们快速浏览一下 arm64 架构上的这段代码:
TEXT runtime·procyield(SB),NOSPLIT,$0-0
MOVWU cycles+0(FP), R0
again:
YIELD
SUBW $1, R0
CBNZ R0, again
RET
汇编代码运行 30 个周期的紧密循环 (runtime.procyield(30)),反复让出 cpu 并递减旋转计数器。
自旋后,它会尝试再次获取锁。如果失败,在放弃之前还有三次旋转的机会。因此,总共会尝试最多 120 个周期。如果仍然无法获得锁,则会增加等待者计数,将自己放入等待队列,进入睡眠状态,等待信号唤醒并重试。
为什么我们需要旋转?
旋转背后的想法是等待一小会儿,希望互斥体很快就会释放,让 goroutine 抓住互斥体,而无需睡眠-唤醒周期的开销。
...
完整帖子可在此处查看:go sync mutex:正常和饥饿模式。
终于介绍完啦!小伙伴们,这篇关于《Go Sync Mutex:正常模式和饥饿模式》的介绍应该让你收获多多了吧!欢迎大家收藏或分享给更多需要学习的朋友吧~golang学习网公众号也会发布Golang相关知识,快来关注吧!
-
860 收藏
-
843 收藏
-
826 收藏
-
809 收藏
-
792 收藏
-
471 收藏
-
392 收藏
-
418 收藏
-
Golang · Go教程 | 1星期前 | goroutine · Context · 超时控制 · Go教程 · 后端开发 · Go Goroutine context 超时控制 WithTimeout Done QueryContext166 收藏
-
Golang · Go教程 | 1星期前 | WaitGroup · channel · 并发编程 · 优雅关闭 · Go教程 · WaitGroup Channel关闭 Go channel 并发收尾 done信号165 收藏
-
332 收藏
-
115 收藏
-
Golang · Go教程 | 1星期前 | errgroup · go · Context · 并发编程 · SetLimit · Go 并发任务 errgroup SetLimit context取消301 收藏
-
Golang · Go教程 | 1星期前 | map · 并发安全 · RWMutex · sync.Map · Go教程 · 并发安全 RWMutex sync.Map Go map并发读写 go test race272 收藏
-
114 收藏
-
458 收藏
-
501 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习