洗手间的堡垒
来源:dev.to
时间:2025-02-18 13:58:08 452浏览 收藏
有志者,事竟成!如果你在学习文章,那么本文《洗手间的堡垒》,就很适合你!文章讲解的知识点主要包括,若是你对本文感兴趣,或者是想搞懂其中某个知识点,就请你继续往下看吧~
代码的出现2024第14天
第1部分
跟踪包装运动
在这里有很多事情要做。
>,我相信我可以完成至少一颗金星。
我的任务似乎包括:
- 解析所有整数的输入
- 生成机器人列表
- 创建网格
- 在modulo的帮助下,进程100移动
- 的迭代 确定每个象限的边界
- 检查每个机器人并计算四个总和,每个象限
- >一个总和 >总和
是时候摇滚!
>一次一步
使用regex将输入输入到机器人列表中
从这样的行中:
p=9,5 v=-3,-3
我想获得所有四个整数,包括负标志。 我将使用此正则表达式:
/-?\d+/g
和一些数据结构操纵以获取这些值:let [px, py, vx, vy] = [...robot.matchall(/-?\d+/g)].map(el => +el[0])
设置网格
let width = 11
let height = 7
let grid = new array(height).fill('.')
.map(el => new array(width).fill('.'))
老实说,不需要网格。> 最后,我可以检查每个机器人驻留的数字范围以确定该象限的总和。
>仍然很高兴知道我可以使用网格。>
简单而直接。
处理机器人运动和传送
正x值平均移动右移动(较高索引)。负:左。
正值y值平均向下移动(较高的索引)。负:up。
>机器人否则任何时候都会超出范围,而是让它们的行为就像移动到同一方向的网格上。
借助modulo操作员,该计算变得容易了,这给了我剩余的。
好吧,这使得从范围下向下移动。>
>向上移动,从范围中移出将需要从网格的宽度和高度中减去。时间将所有这些逻辑编码!
首先,循环的骨头:
for (let i = 0; i < 100; i++) {
robots = robots.map(bot => {
let [px, py, vx, vy] = bot
if (vx < 0) {
} else {
}
if (vy < 0) {
} else {
}
})
}
接下来,处理每种条件:
for (let i = 0; i < 100; i++) {
robots = robots.map(bot => {
let [px, py, vx, vy] = bot
if (vx < 0) {
px += vx
if (px < 0) {
px = width - 1 + px
}
} else {
px = (px + vx) % (width - 1)
}
if (vy < 0) {
py += vy
if (py < 0) {
py = height - 1 + py
}
} else {
py = (py + vx) % (height - 1)
}
})
}
我在不进行测试的情况下写了这篇文章。
让我们看看我必须调试多少。
好吧,第一个问题:
确保地图返回某物!
>
多么愚蠢的错误。
下一期:
在最后的其他条款中,我错误地引用了vx,而不是vy
- 另一个愚蠢的错误!
幸运的是,这些似乎是我唯一的错误。
>>我现在使用此代码看到了预期的电网量:
robots.foreach(bot => {
let [px, py] = bot
if (grid[py][px] == 1) {
grid[py][px] = 2
} else {
grid[py][px] = 1
}
})
console.log(grid.map(line => line.join('')).join('\n'))
-
对每个象限进行计数
- 示例网格为11x7。
0,0 to 0,4 2,0 to 2,4 0,6 to 0,10 2,6 to 2,10 4,0 to 4,4 6,0 to 6,4 4,6 to 4,10 6,6 to 6,10
数字都是均匀的。
数字等于:
>之一
的侧长除以两个:圆形和减去一个或舍入
>侧长度减去一个
我可以通过一系列非常复杂的条件子句解决此问题。
let quads = [0,0,0,0]
robots.foreach(([px, py]) => {
if (px <= (math.floor(width / 2) - 1)) {
// left half
if (py <= (math.floor(height / 2) - 1)) {
// top quadrant
quads[0]++
} else if (py >= math.ceil(height / 2)) {
// bottom quadrant
quads[1]++
}
} else if (px >= (math.ceil(width / 2))) {
// right half
if (py <= (math.floor(height / 2) - 1)) {
// top quadrant
quads[2]++
} else if (py >= math.ceil(height / 2)) {
// bottom quadrant
quads[3]++
}
}
})
最后,每个tall的乘积:
quads.reduce((a, c) => a * c)
它会生成
我的难题输入吗?
让我检查每个象限的价值。
每个都超过一百。
有500个机器人。>我敢肯定有几个落在水平或垂直的中点上。
这个数字可能是正确的。
>提交... 是对的!!!
woohoo !!!
我觉得这将是一个检查点式的挑战,其中第2部分是真正的难题。
等不及要看。第2部分
哦,酷,我可以模拟机器人!
据说它们在某个时候形成了一棵圣诞树。
可能是几秒钟。
可能是数百个。
是时候构建我的第一个模拟器2024!
>
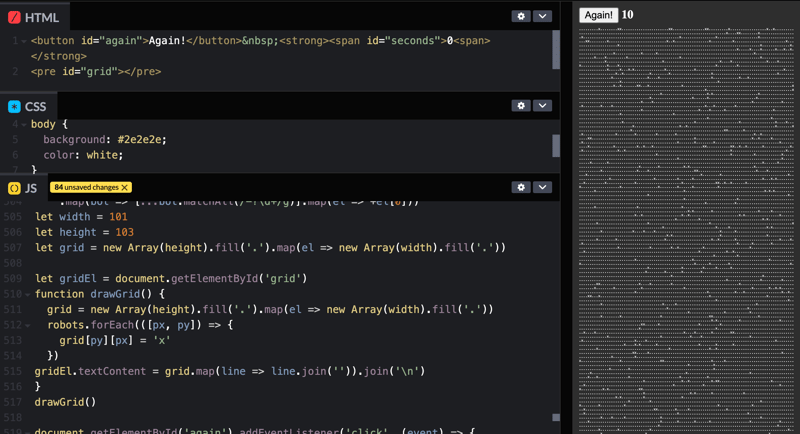
构建模拟器这很容易。
我使用codepen.io。
网格很小,可以适合宽屏。
>但有效:
增强模拟器
按下按钮执行迭代
我按了一束,看到了两个经常性的模式>
我想知道机器人以其初始状态重新启动需要多少迭代我使用set()跟踪每个状态
我使用setinterval()以快速pace
自动识别
我添加了一个列表以显示重复状态>我按下按钮,看着数量爬入数千个
 > 10k之后,机器人返回其起始状态
> 10k之后,机器人返回其起始状态
>我再次按下按钮,看着它爬入数千个,当机器人启动新循环
时看到了相同的迭代号码- 我现在知道我的拼图输入循环中的机器人每10403迭代一次。
- 作弊,或者让我的眼睛紧张
- >我真的不想手动浏览所有10403迭代,寻找圣诞树。
- 我知道我可以提交4个答案,并提示我的提交太高还是低。 我很想进行四个二进制搜索:
- 提交5000并检查高或低 >
- 提交2500或7500,然后检查高或低
- 提交1200或3700或6300或8800,然后检查高或低
- >再次提交并检查
- 然后,我只需要检查几百个州,而不是10000个州。 >,如果它接近10403,而不是0,我可以通过使我的计数从那里开始并倒数来解释。
我要去做:
提交5201:太低
提交的7803:太高
>
提交的6502:太低>
- 正确的答案在6502和7803之间
- 那是1300个国家,我的眼睛可怜。 比超过10k好,对吗?
- 我看到了!
- 我添加了一些按钮以快速进度,然后慢
- > 我加速了6500迭代
我试图用一只眼睛眨眼,所以我不会错过这棵树
然后,突然间,它出现了!
我暂停了计时器,看到了7612
- >之前
- 一定是几个步骤 是时候重新启动和手动行走,从7500
- 开始
- 我又看到了!
一次,因为我错误地连接了我的新按钮
>又是因为我超越了加速的迭代
,但是,最终,我用图片停在状态下了:
- 我从来没有更高兴看到ascii圣诞树。
- > 我的柜台是正确的 - 这个数字是我正确的答案。
- > 我不知道我将如何解决此算法。
- ,但这真的很有趣。 >
- 即使我必须利用错误的提交来执行一种二进制搜索以找到答案。
- 这是运行的全部部分,对吗?! >
- 我自豪地将我的两个金星带到第15天。
文中关于的知识介绍,希望对你的学习有所帮助!若是受益匪浅,那就动动鼠标收藏这篇《洗手间的堡垒》文章吧,也可关注golang学习网公众号了解相关技术文章。
-
502 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
296 收藏
-
351 收藏
-
498 收藏
-
287 收藏
-
179 收藏
-
433 收藏
-
374 收藏
-
422 收藏
-
449 收藏
-
105 收藏
-
285 收藏
-
111 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习