智源发布RoboBrain2.5具身智能模型
时间:2026-02-18 14:36:48 159浏览 收藏
智源研究院最新发布的RoboBrain 2.5具身智能模型,直面行业长期难题——空间感知不准与执行过程不稳,通过大规模时空联合监督训练,首次实现高保真3D空间推理与细粒度时序价值评估的双重突破:不仅能将视觉输入精准转化为真实尺度下的稳定运动轨迹,做到“抓得准、放得稳”,还能在复杂动态任务中实时评估进展与风险,自主调整决策、闭环容错,真正让机器人“动得准、控得稳、靠得住”;该模型已在多项权威评测中刷新SOTA,标志着具身智能正从“理解世界”迈向“可靠行动”,为实际部署与规模化落地铺平道路。
智源研究院正式推出全新一代具身智能基础模型——RoboBrain2.5,直面具身智能长期存在的“空间感知不准”与“执行过程不稳”两大核心挑战。该模型依托大规模、高精度的时空联合监督训练,在真实物理世界交互能力上实现双重关键突破:
- 高保真3D空间推理:将二维视觉输入精准映射至真实尺度下的可执行运动轨迹,显著提升机器人操作的定位精度与动作稳定性,真正实现“抓得准、放得稳”;
- 细粒度时序价值评估:在任务执行过程中持续建模状态进展与潜在风险,支撑长周期、强动态场景下的自主决策调整与闭环容错恢复。
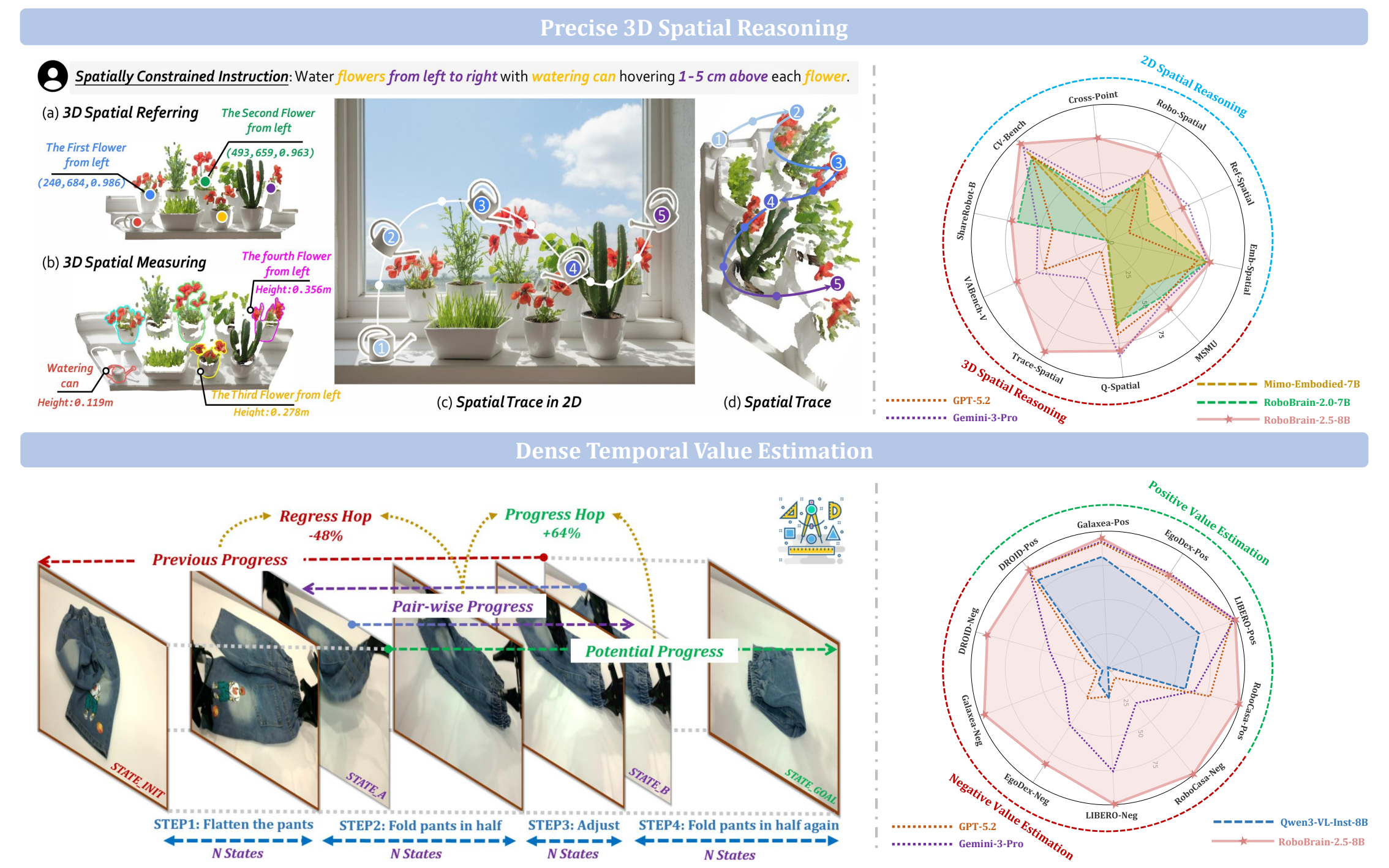
作为RoboBrain系列的最新迭代版本,RoboBrain 2.5 在继承原有通用感知理解、三维空间建模以及时序动态表征能力的基础上,进一步通过更海量、更高质量的时空对齐监督数据进行强化训练,系统性升级了两大核心能力模块:Precise 3D Spatial Reasoning(精确3D空间推理) 与 Dense Temporal Value Estimation(稠密时序价值预测)。这使得机器人不仅能够理解任务语义,更能严格遵循物理规律、实时响应过程反馈,确保任务“落得实、执行准、运行稳”,推动具身智能从“看得懂、说得清”,迈向“动得准、控得稳、靠得住”。
目前,RoboBrain2.5 已在多个空间推理与时序价值建模标准评测任务中刷新SOTA性能纪录,为具身智能走向实际部署、闭环控制与规模化应用提供了坚实技术底座。
获取方式:
项目主页:https://superrobobrain.github.io
技术报告:https://arxiv.org/abs/2601.14352
GitHub 仓库:https://github.com/FlagOpen/RoboBrain2.5
模型权重(Hugging Face):https://huggingface.co/collections/BAAI/robobrain25
多芯片适配版本:https://huggingface.co/FlagRelease
今天带大家了解了的相关知识,希望对你有所帮助;关于科技周边的技术知识我们会一点点深入介绍,欢迎大家关注golang学习网公众号,一起学习编程~
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
277 收藏
-
285 收藏
-
270 收藏
-
370 收藏
-
488 收藏
-
155 收藏
-
134 收藏
-
158 收藏
-
218 收藏
-
105 收藏
-
365 收藏
-
226 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习