GoLang channel底层代码分析详解
来源:脚本之家
时间:2022-12-29 15:10:18 299浏览 收藏
本篇文章向大家介绍《GoLang channel底层代码分析详解》,主要包括Langchannel,具有一定的参考价值,需要的朋友可以参考一下。
以下源码都摘自 golang 1.16.15 版本。
1. channel 底层结构
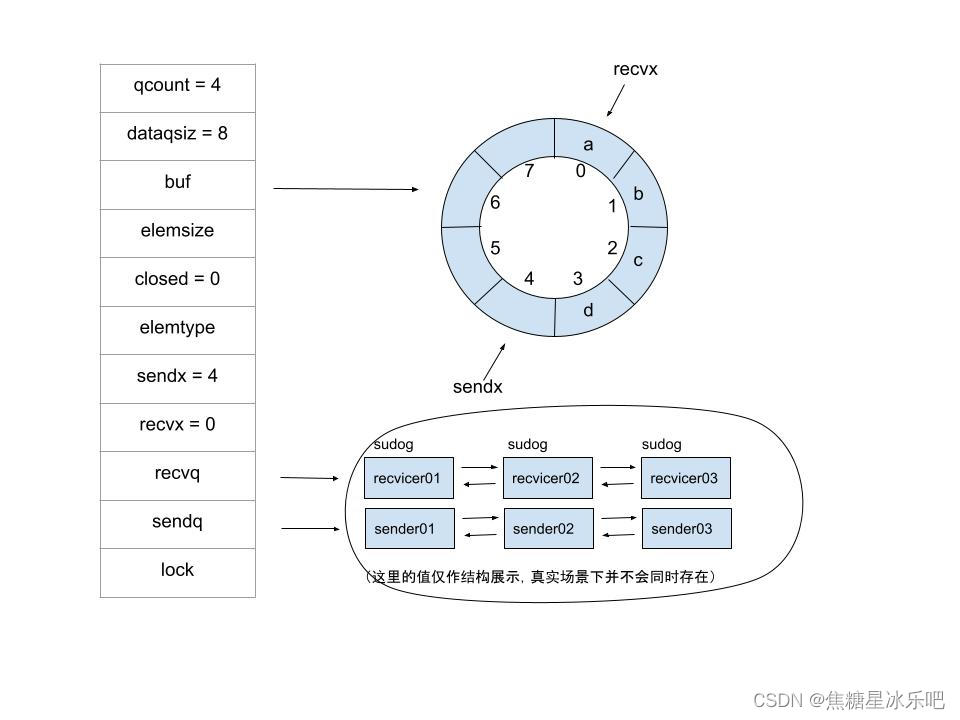
Golang 中的 channel 对应的底层结构为 hchan 结构体(channel的源码位置在Golang包的 runtime/chan.go):
type hchan struct {
qcount uint // buf当前元素的数量
dataqsiz uint // buf的容量
buf unsafe.Pointer // channel缓冲区,一个循环数组
elemsize uint16 // 元素大小
closed uint32 // channel关闭标记
elemtype *_type // element type
sendx uint // 当下一次发送数据到channel时,数据存放到buf中的哪个index
recvx uint // 当下一次从channel接收数据时,从buf的哪个index获取数据
recvq waitq // 等待接收数据的goroutine列表,双向链表
sendq waitq // 等待发送数据的goroutine列表,双向链表
lock mutex // 互斥锁,发送和接收操作前需要获取的锁,所以channel的发送和接收操作是互斥的
}
如果 dataqsiz == 0 时,则为无缓冲 channel,如果 dataqsiz > 0 时,则为有缓冲 channel。
其中 recvq 和 sendq 是一个双向链表结构,链表中的元素为 sudog 结构体,其中该结构体中保存了g,所以本质上recvq 和 sendq 是保存了等待接收/发送数据的goroutine列表。
channel 中的 recvq 和 sendq 的使用场景如下所示:
在从 channel 接收数据时 (data :=
在向 channel 发送数据时 (ch
type waitq struct {
first *sudog
last *sudog
}
// sudog表示等待队列中的一个g,例如在一个channel中的发送/接收。
// sudog是必要的,因为g和同步对象的关系是多对多的,一个g可以在多个等待队列中,因此一个g会有很多个sudog,
// 很多g可能在等待着同一个同步对象,因此一个对象可能有多个sudog。
// sudog是从一个特殊的池中分配的,使用acquireSudog和releaseSudog分配和释放它们。
type sudog struct {
// 以下字段受此sudog阻塞的channel的hchan.lock保护
g *g
next *sudog
prev *sudog
elem unsafe.Pointer // data element (may point to stack)
// 以下字段永远不会被同时访问
// 对于channel,waitlink只能被g访问
// 对于信号量,所有字段(包括上述字段)只有在持有semaRoot锁时才能访问。
acquiretime int64
releasetime int64
ticket uint32
// isSelect表示g正在参与选择,因此g.selectDone必须经过CAS处理,才能被唤醒
isSelect bool
// success表示通过channel c的通信是否成功。
// 如果goroutine因为通过channel c传递了一个值而被唤醒,则为true
// 如果因为c被关闭而唤醒,则为false
success bool
parent *sudog // semaRoot binary tree
waitlink *sudog // g.waiting list or semaRoot
waittail *sudog // semaRoot
c *hchan // channel
}
channel 结构图:
2. channel 的创建
// 无缓冲channel ch := make(chan int) // 缓冲大小为5的channel ch2 := make(chan int, 5)
创建 channel 的源码为runtime/chan.go文件中的 makechan 函数:
func makechan(t *chantype, size int) *hchan {
elem := t.elem
// compiler checks this but be safe.
if elem.size >= 1 maxAlign {
throw("makechan: bad alignment")
}
mem, overflow := math.MulUintptr(elem.size, uintptr(size))
if overflow || mem > maxAlloc-hchanSize || size
注意这里返回的是 hchan 的指针,因此我们在函数间可以直接传递 channel,而不用传递channel的指针了。
另外,因为channel 的内存分配都用到了 mallocgc 函数,而 mallocgc 是负责堆内存分配的关键函数,因此可见 channel 是分配在堆内存上的。
3. channel 的发送流程

channel 的发送:
ch
channel 发送的源码对应 runtime/chan.go 的 chansend 函数:
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
// 如果当前channel是nil
if c == nil {
// 如果不阻塞,则直接返回false
if !block {
return false
}
// 挂起当前goroutine
gopark(nil, nil, waitReasonChanSendNilChan, traceEvGoStop, 2)
throw("unreachable")
}
if debugChan {
print("chansend: chan=", c, "\n")
}
if raceenabled {
racereadpc(c.raceaddr(), callerpc, funcPC(chansend))
}
// 这里访问了hchan结构中的closed, full函数内部访问了dataqsiz,recvq,qcount字段,这里没有加锁,是为什么呢?
// 先说说这里判断的含义:如果不阻塞,且channel没有被关闭,且buf已满,则快速返回false,表示数据发送失败。
// 因为没有加锁,假如在判断c.closed == 0之后结果为true,在判断full之前,这时channel被其他goroutine关闭了,
// 然后full函数返回了true,那么它会直接return false,这样子会有什么影响呢?
// 其实并没有什么影响,在这种情况下返回false也是合理的,因为都是表示在不阻塞的情况下发送数据失败。
// 所以这里访问hchan里面的数据就没有加锁了
if !block && c.closed == 0 && full(c) {
return false
}
var t0 int64
if blockprofilerate > 0 {
t0 = cputicks()
}
// 锁住channel,可见channel是并发安全的
lock(&c.lock)
// 如果channel已关闭,则panic
if c.closed != 0 {
unlock(&c.lock)
panic(plainError("send on closed channel"))
}
// 如果recvq等待接收队列中有值,则直接把值传给等待接收的goroutine,这样可以减少一次内存拷贝
if sg := c.recvq.dequeue(); sg != nil {
send(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true
}
// 如果recvq等待接收队列中没有值,且为有缓冲channel,则把数据copy到buf中
if c.qcount 0 {
blockevent(mysg.releasetime-t0, 2)
}
mysg.c = nil
releaseSudog(mysg)
if closed {
if c.closed == 0 {
throw("chansend: spurious wakeup")
}
// 如果唤醒后,发现 channel 被关闭,则关闭
panic(plainError("send on closed channel"))
}
return true
}
full 函数,用于判断当前channel是否还有坑位接收待发送的数据:
// 判断channel中是否还有位置存放数据
func full(c *hchan) bool {
// 如果是非缓冲channel
if c.dataqsiz == 0 {
// 如果 recvq 中没有等待接收数据的 goroutine,则返回 true,表示已满,否则返回 false
return c.recvq.first == nil
}
// 如果是有缓冲 channel,则判断buf是否已满
return c.qcount == c.dataqsiz
}
send 函数,在recvq中有等待接收数据的goroutine时会被调用:
// 在一个空的 channel c 中完成发送操作
// 把数据 ep 从发送者复制到接收者 sg 中
// 最后接收的 goroutine 会被唤醒
// channel c 一定是空的且被锁住的
// sg 一定是已经从 c 的 recvq 中出队了
// eq 一定是不等于 nil 的,且指向堆或者是调用者的栈
func send(c *hchan, sg *sudog, ep unsafe.Pointer, unlockf func(), skip int) {
if raceenabled {
if c.dataqsiz == 0 {
racesync(c, sg)
} else {
// Pretend we go through the buffer, even though
// we copy directly. Note that we need to increment
// the head/tail locations only when raceenabled.
racenotify(c, c.recvx, nil)
racenotify(c, c.recvx, sg)
c.recvx++
if c.recvx == c.dataqsiz {
c.recvx = 0
}
c.sendx = c.recvx // c.sendx = (c.sendx+1) % c.dataqsiz
}
}
// sg.elem 指向接收者存放接收数据的存放的位置
if sg.elem != nil {
// 直接内存拷贝,从发送者拷贝到接收者内存
sendDirect(c.elemtype, sg, ep)
sg.elem = nil
}
gp := sg.g
// 解锁
unlockf()
gp.param = unsafe.Pointer(sg)
sg.success = true
if sg.releasetime != 0 {
sg.releasetime = cputicks()
}
// 唤醒接收数据的goroutine
goready(gp, skip+1)
}
总结 channel 的发送流程:
判断 channel 是否是 nil,如果是,则会永久阻塞导致死锁报错
如果 channel 中 recvq 存在接收者 goroutine,则直接把需要发送的数据拷贝到接收 goroutine,这里其实是有sodog 的结构,里面保存了接受者goroutine的指针。
如果 recvq 中不存在接收者:
a. 如果 buf 没有满,则直接把数据拷贝到 buf 的 sendx 位置
b. 如果 channel 为无缓冲 channel 或 buf 已满,则把当前 goroutine 保存到 sendq 等待队列中,阻塞当前 goroutine
4. channel 的接收流程
channel 的接收:
data := data2, ok :=
channel 的接收分别有2个函数,其中一种是带”ok“返回值的,另外一种是不带"ok"返回值的。
- 带”ok"返回值的函数,该返回的布尔值为 true 时,并不表示当前通道还没有关闭,而是仅仅表示当前获取到的值是通道的正常生产出来的数据,而不是零值;当该布尔值为 false 时,表示当前的通道已经被关闭,并且获取到的值是零值。
- 不带"ok"返回值的函数,当 channel 被关闭时,就不能判断当前获取到的值是 channel 正常生产的值,还是零值了。
// 无返回值
func chanrecv1(c *hchan, elem unsafe.Pointer) {
chanrecv(c, elem, true)
}
// 返回 bool 类型,如果返回false,表示 channel 已经被关闭,否则返回false。
func chanrecv2(c *hchan, elem unsafe.Pointer) (received bool) {
_, received = chanrecv(c, elem, true)
return
}
不管是否返回 received,channel 的接收都调用了 chanrecv 函数:
// 从 channel c 中接收数据,并把数据复制到 ep 中。
// 在忽略接收数据的情况下,eq 可能是 nil,例如:empty,
// 重新排序的读取可能会错误地表示成”open和empty“。
// 为了防止重排序,我们对这2个检查都使用原子加载,并依靠清空和关闭发生在同一个锁下的不同临界区。
// 当关闭带有阻塞发送的非缓冲channel,此假设失败,但这无论如何都是错误的条件。
if atomic.Load(&c.closed) == 0 {
// 因为 channel 不能重新打开,所以在后面这里观察到 channel 没有被关闭,意味着它在第一次判断 empty 的时候也没有关闭。
// 这样就表现得像在第一次判断 empty 时,通道也没有关闭:if empty(c) && atomic.Load(&c.closed) == 0 {...}
return
}
// 当执行到这里的时候,说明 channel 已经被关闭了。
// 这时重新检查通道是否还有其他待接收的数据,这些数据可能在第一次 empty 检查和通道关闭检查之间到达。
// 在这种情况下发送时,也需要按照连贯的顺序。
if empty(c) {
// The channel is irreversibly closed and empty.
if raceenabled {
raceacquire(c.raceaddr())
}
if ep != nil {
typedmemclr(c.elemtype, ep)
}
return true, false
}
}
var t0 int64
if blockprofilerate > 0 {
t0 = cputicks()
}
// 获取锁
lock(&c.lock)
// 如果 channel c 已经被关闭,且 buf 中无元素,将获取到零值
if c.closed != 0 && c.qcount == 0 {
if raceenabled {
raceacquire(c.raceaddr())
}
unlock(&c.lock)
if ep != nil {
typedmemclr(c.elemtype, ep)
}
return true, false
}
// 如果 sendq 中有元素
if sg := c.sendq.dequeue(); sg != nil {
// Found a waiting sender. If buffer is size 0, receive value
// directly from sender. Otherwise, receive from head of queue
// and add sender's value to the tail of the queue (both map to
// the same buffer slot because the queue is full).
// 找到一个正在等待的发送者。
// 1.如果是无缓冲 channel,则直接把从发送者那里接收数据。
// 2.如果是有缓冲 channel,这时 sendq 中有元素,说明 buf 满了,发送者需要等待消费者消费 buf 数据后才能继续发送数据。
// 这时当前的 goroutine 会从 buf 的 recvx 位置接收数据,并且把刚刚获取到的发送者 sg 的发送数据拷贝到 buf 的 sendx 位置中。
recv(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true, true
}
// sendq 中没有等待的发送者,且 buf 中有数据,则直接从 buf 中接收数据
if c.qcount > 0 {
// Receive directly from queue
qp := chanbuf(c, c.recvx)
if raceenabled {
racenotify(c, c.recvx, nil)
}
if ep != nil {
typedmemmove(c.elemtype, ep, qp)
}
typedmemclr(c.elemtype, qp)
c.recvx++
if c.recvx == c.dataqsiz {
c.recvx = 0
}
c.qcount--
// 解锁
unlock(&c.lock)
return true, true
}
// 如果代码运行到这里,说明 channel 中没有数据可以接收了,接下来就要准备阻塞当前 goroutine 了
// 如果不阻塞,则快速返回
if !block {
// 解锁
unlock(&c.lock)
return false, false
}
// no sender available: block on this channel.
// 构造sudog
// 获取当前 goroutine 指针
gp := getg()
mysg := acquireSudog()
mysg.releasetime = 0
if t0 != 0 {
mysg.releasetime = -1
}
// No stack splits between assigning elem and enqueuing mysg
// on gp.waiting where copystack can find it.
mysg.elem = ep
mysg.waitlink = nil
gp.waiting = mysg
mysg.g = gp
mysg.isSelect = false
mysg.c = c
gp.param = nil
// 把构造好的 sudog 入队 recvq
c.recvq.enqueue(mysg)
// Signal to anyone trying to shrink our stack that we're about
// to park on a channel. The window between when this G's status
// changes and when we set gp.activeStackChans is not safe for
// stack shrinking.
atomic.Store8(&gp.parkingOnChan, 1)
// 挂起当前 goroutine
gopark(chanparkcommit, unsafe.Pointer(&c.lock), waitReasonChanReceive, traceEvGoBlockRecv, 2)
// 如果 goroutine 被唤醒,会从这里开始继续执行
if mysg != gp.waiting {
throw("G waiting list is corrupted")
}
gp.waiting = nil
gp.activeStackChans = false
if mysg.releasetime > 0 {
blockevent(mysg.releasetime-t0, 2)
}
success := mysg.success
gp.param = nil
mysg.c = nil
releaseSudog(mysg)
return true, success
}
empty 函数用于判断从 channel c 中读取数据是否会阻塞:
func empty(c *hchan) bool {
// c.dataqsiz 是不会被改变的.
if c.dataqsiz == 0 {
return atomic.Loadp(unsafe.Pointer(&c.sendq.first)) == nil
}
return atomic.Loaduint(&c.qcount) == 0
}
recv 函数在 channel c 的 buf 是满的,且 sendq 中有等待发送的 goroutine 时会被调用:
// 这里分为 2 个部分:
// 1.发送者 sg 待发送的值会被放入通道 buf 中,发送者被唤醒继续执行
// 2.接收方(当前 goroutine)接收的值写入 ep
// 对于同步 channel(无缓冲),2 个值都是一样的
// 对于异步 channel(有缓冲),接收方从 channel buf 获取数据,发送方的数据放入 channel buf
// channel c 一定是满的,且已被锁定,recv 用 unlockf 解锁 channel c。
// sg 一定已经从 sendq 出队
// 不等于 nil 的 ep 一定指向堆或调用者的栈
func recv(c *hchan, sg *sudog, ep unsafe.Pointer, unlockf func(), skip int) {
if c.dataqsiz == 0 {
if raceenabled {
racesync(c, sg)
}
if ep != nil {
// 非缓冲 channel,直接从发送方接收数据
recvDirect(c.elemtype, sg, ep)
}
} else {
// 缓冲 channel,buf 已满
// 先从 buf 队列头部接收数据,然后把获取出来的发送方数据入队
qp := chanbuf(c, c.recvx)
if raceenabled {
racenotify(c, c.recvx, nil)
racenotify(c, c.recvx, sg)
}
// 从 buf 中复制数据到接收方
if ep != nil {
typedmemmove(c.elemtype, ep, qp)
}
// 把发送方 sg 的数据复制到 buf 中
typedmemmove(c.elemtype, qp, sg.elem)
c.recvx++
if c.recvx == c.dataqsiz {
c.recvx = 0
}
c.sendx = c.recvx // c.sendx = (c.sendx+1) % c.dataqsiz
}
sg.elem = nil
gp := sg.g
// 解锁
unlockf()
gp.param = unsafe.Pointer(sg)
sg.success = true
if sg.releasetime != 0 {
sg.releasetime = cputicks()
}
// 唤醒发送方 goroutine
goready(gp, skip+1)
}
总结 channel 的接收流程:
判断 channel 是否是 nil,如果是,则会永久阻塞导致死锁报错如果 channel 中 sendq 有等待发送数据的 goroutine:
a. 如果是无缓存 channel,则直接把要发送的数据拷贝到接收者的 goroutine 中,并唤醒发送方 goroutine;
b. 如果是有缓存的 channel(说明此时recvd满了),则把 buf 中的 recvx 位置的数据拷贝到当前接收的goroutine,然后把 sendq 中第一个等待发送goroutine的数据拷贝到buf 中的 sendx 位置,并唤醒发送的goroutine如果 channel 中 sendq 没有等待发送数据的 goroutine:
a. 如果 buf 有数据,则把 buf 中的 recvx 位置的数据拷贝到当前的接收goroutine
b. 如果 buf 没有数据,则把当前 goroutine 加入 recvd 等待队列中,并挂起
5. channel 使用注意事项
最后啰嗦一下 channel 使用的注意事项,这也是在我们平常开发中容易忽略的:
- 一个 channel 不能多次 close,否则会导致 panic。
- 关闭一个 nil 的 channel,会导致 panic。
- 向一个已经 close 的 channel 发送数据,会导致 panic。
- 不要从一个 receiver 测关闭 channel,也不要在有多个 sender 时关闭 channel。在go语言中,对于一个 channel,如果最终没有任何 goroutine 引用它,不管 channel 有没有被关闭,最终都会被 gc 回收。
- 如果监听的channel 已经关闭,还可以获取到 channel buf 中剩余的值,当接收完 buf 中的数据后,才会获取到零值。
今天关于《GoLang channel底层代码分析详解》的内容就介绍到这里了,是不是学起来一目了然!想要了解更多关于golang的内容请关注golang学习网公众号!
-
215 收藏
-
322 收藏
-
Golang · Go教程 | 2天前 | 并发 · 闭包 · for range · 迁移 · Go教程 · Go 1.22 · Goroutine 闭包 循环变量 Go教程 Go 1.22 for range113 收藏
-
331 收藏
-
Golang · Go教程 | 2天前 | 单元测试 · 错误处理 · Go教程 · errors.Join · errors.Is · errors.Is Go错误处理 Go教程 errors.Join 多错误返回 批量校验352 收藏
-
Golang · Go教程 | 2天前 | Context · 超时控制 · Go教程 · http.Client · Transport · Go context 请求超时 Transport http.Client Client.Timeout ResponseHeaderTimeout218 收藏
-
Golang · Go教程 | 3天前 | 文件下载 · Go教程 · 审计日志 · 接口安全 · 路径穿越 · Go 文件下载 审计日志 HTTP接口 filepath.Clean 安全下载 路径穿越362 收藏
-
273 收藏
-
Golang · Go教程 | 3天前 | CI/CD · gitHub actions · Go教程 · 自托管 Runner · 持续集成 · Go 持续集成 CI Go test GitHub Actions self-hosted runner 自托管 runner340 收藏
-
124 收藏
-
Golang · Go教程 | 3天前 | HTTP · 文件下载 · Go教程 · Range请求 · ServeContent · 断点续传 Content-Range Go教程 HTTP Range ServeContent 206 Partial Content 视频拖动250 收藏
-
Golang · Go教程 | 3天前 | csv · Go教程 · 后端架构 · 流式响应 · 大文件导出 · 大文件下载 FLUSH CSV导出 Go教程 流式写出 csv.Writer rows.Next251 收藏
-
Golang · Go教程 | 3天前 | HTTP服务 · Go教程 · 后端开发 · 超时配置 · 服务稳定性 · net/http WriteTimeout HTTP超时 Go教程 ReadHeaderTimeout IdleTimeout140 收藏
-
Golang · Go教程 | 3天前 | 错误处理 · Context · 并发控制 · Go教程 · 并发控制 Go教程 context取消 context.WithCancelCause context.Cause342 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习