智加科技论文DualBEV入选计算机视觉顶会ECCV
来源:机器之心
时间:2024-07-09 13:52:12 165浏览 收藏
亲爱的编程学习爱好者,如果你点开了这篇文章,说明你对《智加科技论文DualBEV入选计算机视觉顶会ECCV》很感兴趣。本篇文章就来给大家详细解析一下,主要介绍一下,希望所有认真读完的童鞋们,都有实质性的提高。
近日,智加科技团队论文《DualBEV: Unifying Dual Veiw Transformation with Probabilistic Correspondences》入选欧洲计算机视觉国际会议(ECCV, European Conference on Computer Vision),ECCV是计算机视觉领域最具影响力和权威性的国际会议之一,与国际计算机视觉大会(ICCV)和计算机视觉与模式识别会议(CVPR)齐名,被誉为计算机视觉领域的“三大顶会”之一。ECCV 每两年举办一次,汇聚了全球顶尖的研究人员和专家,展示和讨论最前沿的研究成果和技术创新。

Bird's-Eye-View (BEV) 感知是当前自动驾驶感知乃至端到端技术的基石,其中视角转换 (View Transformation) 则是 BEV 感知的核心模块,承担着将图像特征 (2D) 转换到 BEV 空间 (3D) 的重任。目前主流的方案往往会在 3D-to-2D 或 2D-to-3D 的视角转换方案间陷入两难。
3D-to-2D 方案一般依赖 Transformer,在取得不错性能的同时也带来了大量的计算开销。2D-to-3D 虽然计算速度快,但是容易丢失卡车场景关心的远距离信息。
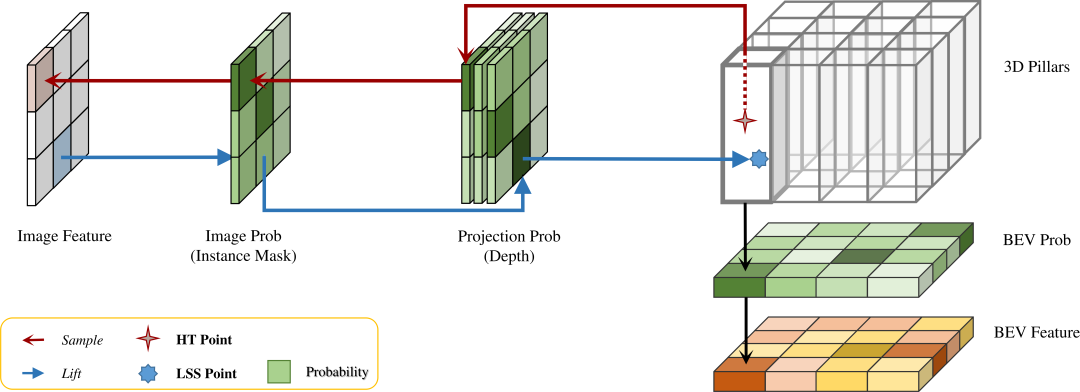
针对这些问题,DualBEV 从蒙特卡洛的概念出发,通过对 View Transformation 本质的思考,把 View Transformation 的过程总结为构建采样、计算权重,进而提出了一种通用的特征转换算法 (Unified Feature Transformation)。该算法首先从两种方向上构建采样,通过三种概率测量的相乘对两种不同方向构建的采样统一进行评估,再通过预计算加速转换过程,融合得到最终的 BEV 特征。
DualBEV 开创性地将 3D-to-2D 和 2D-to-3D 的视角转换方案统一进了一套整体框架内,充分利用各自视角的优势。在 nuScenes Detection Leaderboard 纯视觉方案上以 63.4% NDS 取得了 SOTA 的结果。由于视角转换模块使用了预计算技术,其计算时间仅为 Transformer 方案的 1/40,是榜上最佳视角转换方法。
通过高效的视角转换和多视角信息融合,DualBEV 构建的 BEV 特征提供了精准的场景表征和快速的计算方案,为端到端系统的开发提供了坚实的基础。智加科技正积极推进 DualBEV 在端到端自动驾驶系统中的深度集成,充分发挥其优势,进一步提升自动驾驶系统的整体性能。
技术赋能产品,开源合作共赢
DualBEV 进一步优化后的相关技术已应用于智加科技自主研发的前装量产重卡自动驾驶系统智加领航 2.0 中。该系统开放了领航自动驾驶功能,具备极致安全、舒适省力、节能环保等优势,可实现自主超车、靠边停车、汇入预测以及部分施工规避等高级功能,支持在典型快递快运场景中“双驾变单驾”以显著降低驾驶疲劳度,并通过最高节油 10% 实现节能减排。
目前装配智加领航 2.0 系统的智能重卡 K7+,已被中国邮政、中通快运、安能物流等头部物流公司投入实际运营,覆盖京津冀、长三角、珠三角等核心经济区,持续赋能干线物流行业数智化转型。
此次论文成功入选 ECCV 并进行部分研究成果开源,不仅展示了智加科技在自动驾驶领域的科研及创新能力,也将助力行业标准化和互操作性的提升。智加科技希望通过创新、合作与共享,集中力量攻克关键技术难题,有效推动自动驾驶技术的迭代与突破,最终实现物流运输行业“智能、安全、环保”的高质量发展。
以上就是本文的全部内容了,是否有顺利帮助你解决问题?若是能给你带来学习上的帮助,请大家多多支持golang学习网!更多关于科技周边的相关知识,也可关注golang学习网公众号。
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习