伯克利罗剑岚:机器人的范式革命,藏在真实世界中
时间:2025-01-13 19:42:38 220浏览 收藏
偷偷努力,悄无声息地变强,然后惊艳所有人!哈哈,小伙伴们又来学习啦~今天我将给大家介绍《伯克利罗剑岚:机器人的范式革命,藏在真实世界中》,这篇文章主要会讲到等等知识点,不知道大家对其都有多少了解,下面我们就一起来看一吧!当然,非常希望大家能多多评论,给出合理的建议,我们一起学习,一起进步!
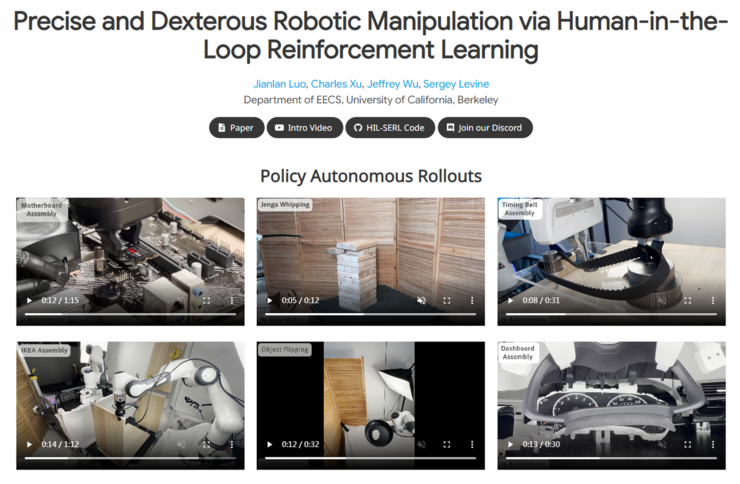
伯克利大学Sergey Levine团队发布的HIL-SERL强化学习框架,为具身智能领域带来了突破性进展,引发广泛关注。该框架使机器人能够直接在现实世界中,通过视觉信息学习通用操作策略。
实验表明,经过1到2.5小时的训练,机器人即可完成诸如主板、仪表盘和正时皮带组装等复杂任务,且成功率高达100%。 这包括组装家具、煎蛋、堆积木、插入U盘等操作,即使面对人为干扰也能保持稳定高效。
此前,强化学习因其局限于模拟环境而备受诟病。但SERL系列研究,特别是HIL-SERL,证明了真机强化学习的可行性及优越性,其效率比模仿学习平均快1.8倍。 这标志着机器人真机强化学习领域的里程碑式突破。 该研究的核心贡献者是伯克利大学在读博士后、中国青年科学家罗剑岚。
HIL-SERL是基于此前罗剑岚团队发布的SERL的升级版本。不同之处在于,HIL-SERL整合了人类的示范和纠正,从而使策略能够从错误中学习并提升性能,而SERL仅依赖人类示范。 这种改进对于那些需要从零开始学习的任务至关重要,HIL-SERL也专注于更具挑战性的任务,例如双臂协调和动态操作。
项目链接:https://hil-serl.github.io/
HIL-SERL的成果甚至超出了罗剑岚和Levine教授的预期,Levine教授看到结果后表示:“You really made RL work.”(你真的让强化学习跑起来了。)
罗剑岚在机器人真机强化学习方向已投入近十年时间。2015年,他进入伯克利机械工程系攻读博士学位,并同时在Pieter Abbeel教授指导下攻读计算机系硕士学位。他的博士论文答辩委员会联席主席正是Pieter Abbeel教授。
他一直致力于将强化学习应用于真实世界,克服了强化学习在真实机器人应用中的诸多挑战。2020年博士毕业后,他加入谷歌,在DeepMind、Everyday Robot和Google X等部门工作,积累了丰富的机器人系统知识。2022年,他重返伯克利,加入Levine教授团队,并取得了SERL系列的突破性成果。
以下是AI科技评论对罗剑岚的采访节选:
重返学术
AI科技评论:您最初是如何接触深度强化学习的?
罗剑岚:机械系的研究范围很广,我的方向是控制。控制论和强化学习在本质上是互补的。2017年暑假,我参与了西门子伯克利分部的一个项目,将深度强化学习应用于工业生产,解决高精度装配等问题,这成为了我在强化学习领域的起点。
AI科技评论:博士毕业后您在谷歌工作了两年,为什么决定重返学术?
罗剑岚:这比较偶然。在谷歌期间,我积累了大量的机器人系统知识。项目孵化为Intrinsic后,我打算回国,Sergey Levine教授建议我到他的组里做博士后,因为我们的能力互补,之前的合作也很愉快。
AI科技评论:您参与了Open X-Embodiment数据集的创建。
罗剑岚:是的,我负责最主要的线缆任务,并将其扩展到更大的规模,最终有200多位合作者参与其中。
AI科技评论:SERL的理念是如何产生的?
罗剑岚:为了让强化学习真正实用,需要一个开源的、端到端的解决方案。在谷歌的工作经验为SERL的开发奠定了基础。SERL首次实现了在真实世界中,通过视觉信息,在20分钟内完成精密装配。
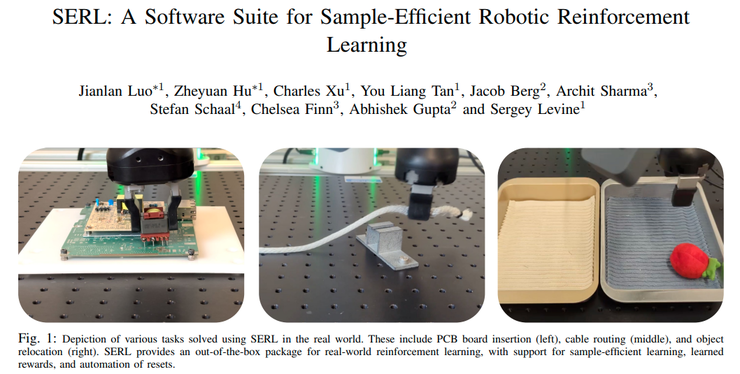
论文链接:https://arxiv.org/pdf/2401.16013
现实世界的拥护者
AI科技评论:您是现实世界和真实数据的坚定拥护者?
罗剑岚:是的,我认为仿真器并不能完全替代真实世界。虽然仿真对移动机器人有效,但操作任务的复杂性远超移动,需要在真实环境中进行训练。Sergey Levine教授也认同这一点。
AI科技评论:您很早就开始研究强化学习在现实世界的应用了。
罗剑岚:是的,从2017年开始,我就一直沿着这个方向研究,因为很多人试了一两次不work就放弃了。
强化学习之于具身智能
AI科技评论:大模型的兴起是否让强化学习在机器人学习领域降温?
罗剑岚:我认为强化学习仍然非常重要,HIL-SERL的成功率是100%。大模型和强化学习可以结合,大模型提供初始策略,强化学习进行优化。
AI科技评论:您如何看待强化学习在机器人学习或具身智能中的作用?
罗剑岚:强化学习是具身智能不可或缺的一部分,它能够使机器人超越人类的效率。
中国优势
AI科技评论:您如何看待具身智能的火热趋势?中国的优势在哪里?
罗剑岚:我认为中国的供应链优势和性价比优势非常重要,这使得中国在具身智能领域具有很大的潜力。
接下来的计划
AI科技评论:可以分享一下您接下来的计划吗?
罗剑岚:我计划继续关注通用高性能机器人,特别是工业生产领域。 我希望将科研成果转化为实际应用,创造更大的社会价值。 我相信,通过机器人技术提高自动化水平,可以降低人力成本,释放人类生产力。
关于具身智能领域的更多精彩故事,欢迎添加PHP中文网作者微信 anna042023 交流。PHP中文网(公众号:PHP中文网)
相关文章:
伯克利具身智能图谱:深度强化学习浪尖上的中国 90 后们
终于介绍完啦!小伙伴们,这篇关于《伯克利罗剑岚:机器人的范式革命,藏在真实世界中》的介绍应该让你收获多多了吧!欢迎大家收藏或分享给更多需要学习的朋友吧~golang学习网公众号也会发布科技周边相关知识,快来关注吧!
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
191 收藏
-
299 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · mcp · ai agent · 工具接入 · 安全审计 · AI Agent MCP Model Context Protocol 工具清单 资源上下文 权限审计378 收藏
-
195 收藏
-
453 收藏
-
202 收藏
-
419 收藏
-
170 收藏
-
475 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · tracing · ai agent · 可观测性 · 工具调用 · 可观测性 AI Agent Tracing 工具调用 OpenAI Agents SDK292 收藏
-
379 收藏
-
394 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习