北理工团队突破复杂环境自动驾驶数据集建设
时间:2025-04-12 11:13:37 384浏览 收藏
对于一个科技周边开发者来说,牢固扎实的基础是十分重要的,golang学习网就来带大家一点点的掌握基础知识点。今天本篇文章带大家了解《北理工团队复杂环境自动驾驶数据集建设取得突破》,主要介绍了,希望对大家的知识积累有所帮助,快点收藏起来吧,否则需要时就找不到了!
北京理工大学科研团队发布国际首个复杂环境自动驾驶双4D毫米波雷达数据集Dual Radar,为自动驾驶感知算法研究提供了宝贵资源。该数据集采集了超过400公里真实道路数据,包含超过10000帧同步标注数据,涵盖了多种复杂场景,例如不同天气(晴天、阴天、雨天)、光照条件(正常光照、逆光)、道路类型(城市道路、隧道)以及时间段(白天、黄昏、夜晚)。
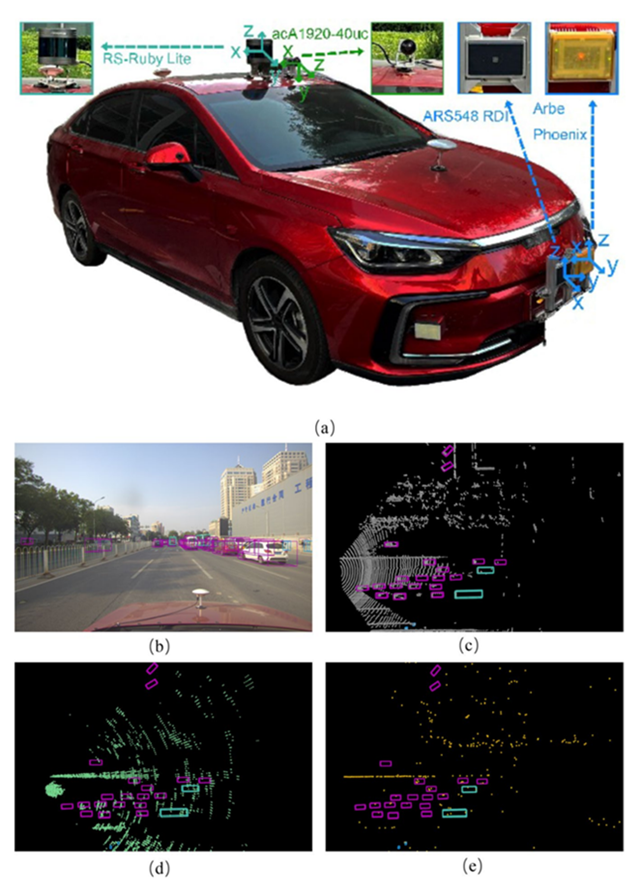
图1:Dual Radar数据采集车辆及传感器数据示例
Dual Radar数据集的核心在于使用了两种不同类型的4D毫米波雷达:Arbe Phoenix和ARS548 RDI。Arbe Phoenix雷达视野广,点云密度高,但噪声也相对较大;ARS548 RDI雷达噪声低,长距离探测精度高,但点云密度较低。 这两种雷达的互补特性,使得Dual Radar数据集能够更全面地评估自动驾驶感知算法在不同点云密度和噪声水平下的性能。
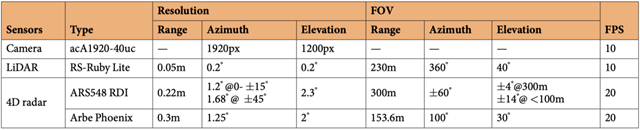
表1:车载传感器参数
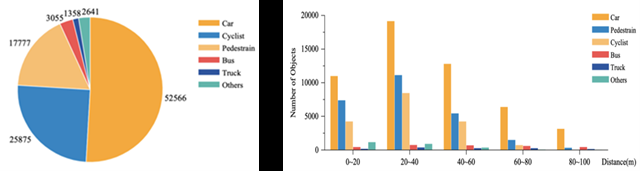
图2:目标类别数量及距离分布
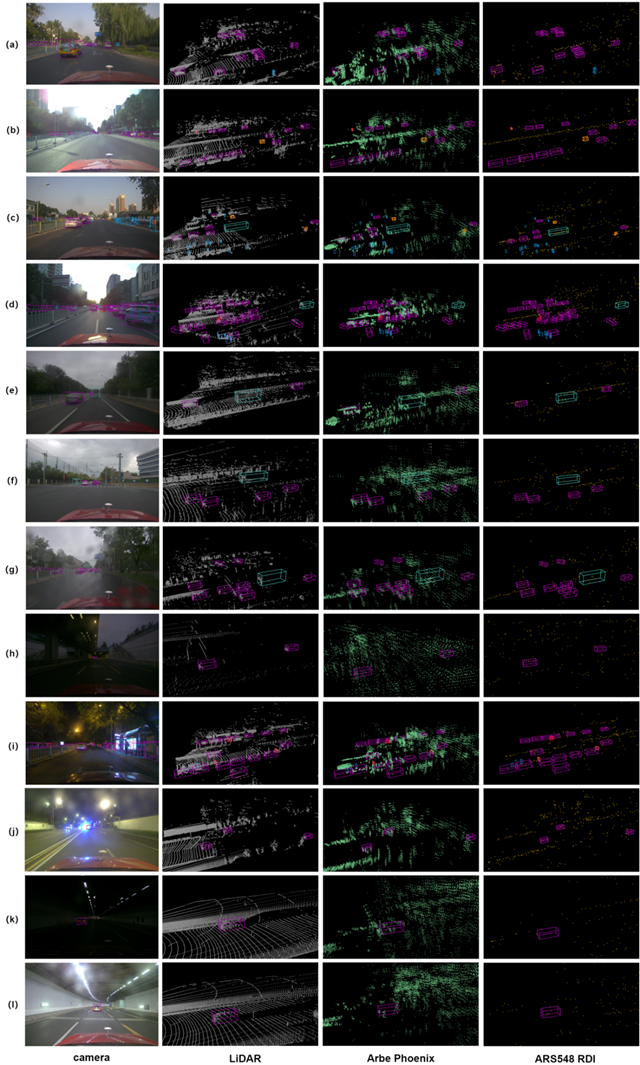
图3:三维目标检测标注示例
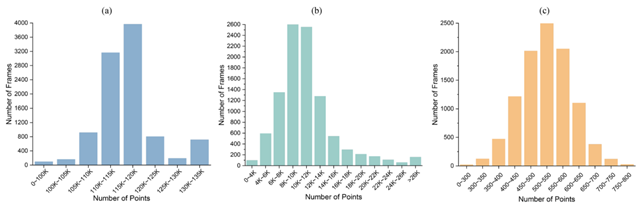
图4:不同传感器点云数量统计
该数据集包含汽车、行人、自行车、公交车、卡车等多种目标类别,并提供了详细的三维目标检测和跟踪标注。 研究团队相信,Dual Radar数据集能够有效推动自动驾驶感知算法在复杂和极端环境下的发展,提升自动驾驶系统的安全性与可靠性,最终促进自动驾驶技术的进步。 数据集已公开发布,方便全球研究人员进行算法测试和改进。
今天关于《北理工团队突破复杂环境自动驾驶数据集建设》的内容介绍就到此结束,如果有什么疑问或者建议,可以在golang学习网公众号下多多回复交流;文中若有不正之处,也希望回复留言以告知!
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
468 收藏
-
科技周边 · 人工智能 | 12小时前 | 人工智能 · ai agent · AI应用 · 工具调用 · 权限边界 · 审计链路 · 人工智能 权限控制 AI Agent 工具调用 审批链路 审计回放 上线指标343 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · GenAI · opentelemetry · 可观测性 · AI工程 · 人工智能 链路追踪 GenAI OpenTelemetry AI可观测性 LLM网关 Token统计427 收藏
-
154 收藏
-
309 收藏
-
234 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · 前端流式输出 · AI聊天 · Fetch Stream · 前端 AI聊天 流式输出 ReadableStream TextDecoder Fetch Stream448 收藏
-
427 收藏
-
191 收藏
-
299 收藏
-
科技周边 · 人工智能 | 3星期前 | 人工智能 · mcp · ai agent · 工具接入 · 安全审计 · AI Agent MCP Model Context Protocol 工具清单 资源上下文 权限审计378 收藏
-
195 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习