微美全息开发基于增强现实控制的闭环混合信号脑机接口机械臂控制系统
来源:搜狐
时间:2023-05-27 06:20:45 123浏览 收藏
在IT行业这个发展更新速度很快的行业,只有不停止的学习,才不会被行业所淘汰。如果你是科技周边学习者,那么本文《微美全息开发基于增强现实控制的闭环混合信号脑机接口机械臂控制系统》就很适合你!本篇内容主要包括##content_title##,希望对大家的知识积累有所帮助,助力实战开发!
随着科技的不断发展,人们对于机器人技术的需求也逐渐增加。机器人技术的应用越来越广泛,而机械臂控制系统在许多领域都是至关重要的应用领域。脑机接口(BMI)也已被广泛用于控制机械臂。使用机械臂控制物体对BMI用户而言仍是一项繁琐的任务。即使经过广泛的训练,也很难达到高效率和准确性。一个重要的原因是用户缺乏足够的反馈信息来执行闭环控制。
据报道,微美全息提出了一种增强现实(AR)引导的辅助方法,使用混合BMI为用户提供增强的视觉反馈,用于闭环控制,该混合BMI结合了脑电图信号和眼睛跟踪,以直观有效地控制机械臂。
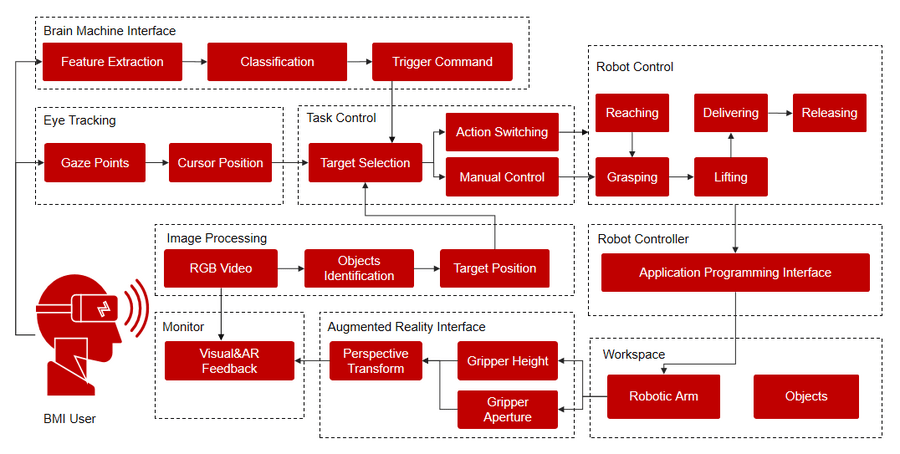
公开资料显示,微美全息开发的基于增强现实控制的闭环混合信号脑机接口机械臂控制方法,通过结合基于脑电图(EEG)信号的BMI和眼动追踪技术,为用户提供增强的视觉反馈,在控制机械臂过程中实现闭环控制。用户可以利用系统中的BMI、眼睛跟踪、图像处理、自动控制和AR接口等功能来完成对象操作任务。图像处理用于从工作空间的图像中分割所有潜在的矩形对象。用户可以使用眼睛跟踪来选择分割的对象。从BMI解码的输出用于(1)确认用户选择的对象,(2)切换动作顺序,或(3)在抓取和提升过程中连续控制夹具的孔径和高度。AR技术实时将用户所选物体以及其抓取和提升操作的状态反馈给计算机屏幕上的用户。最终,根据混合BMI解码的输出,机械臂会进行拉伸、抓取、提升、递送以及释放等任务。该系统的装备包括眼动仪、脑电图耳机、电脑、机械臂和 USB 摄像头。使用结合了BMI和AR增强的混合视觉反馈进行用户和系统之间的交互。
WIMI微美全息研发的基于增强现实控制的闭环混合信号脑机接口机械臂控制系统包括:
增强现实控制界面:通过AR技术,设计出一个直观、易用的控制界面,用户可以通过手势或语音等方式控制机械臂的运动。
采集脑电信号:使用脑电图设备采集用户大脑的电信号,将其传输到计算机。
处理脑电信号:使用信号处理算法,对脑电信号进行滤波、特征提取等操作,提取出用户想要控制的机械臂运动的指令。
生成控制信号:根据用户的脑电信号,生成控制信号,控制机械臂的运动。
机械臂控制:机械臂的控制系统,包括电机驱动器、位置传感器、控制芯片等硬件设备的选择和搭建。
实现闭环控制:将采集到的机械臂位置反馈信息传输回计算机,实现闭环控制,确保机械臂的运动精确、稳定。
实时控制:将用户的控制信号和机械臂位置反馈信息实时传输到机械臂控制系统中,实现实时控制。
同时,WIMI微美全息对所开发的闭环系统(具有AR反馈)与目前传统的开环系统(仅具有视觉检查)进行了测试。实验结果显示,使用AR反馈与仅进行常规视觉检查相比,可以显著减少抓取和提升物体的触发命令。此外,夹具在提升过程中的高度间隙也减小了。AR界面提供的信息让混合BMI用户受益,从而提高了效率并降低了认知负荷在抓握过程中的影响。AR反馈的闭环系统为用户使用混合BMI控制机械臂提供了一种新颖有效的方法,通过集成更先进的图像处理和机器学习算法来进一步改进传统控制系统,以增强工作空间中对象的分割和BMI信号的解码。
科技在不断进步和发展,机器人技术的应用场景越来越广泛。由于其作为机器人技术的重要应用领域,机械臂控制系统市场前景非常广阔。机械臂控制系统已经成为了生产制造行业中不可或缺的工具,特别重要。WIMI微美全息基于增强现实控制的闭环混合信号脑机接口机械臂控制系统,采用了增强现实技术和脑机接口技术,可以提高操作的准确性和速度,同时还保证了操作的安全性,拥有非常广泛的市场前景。WIMI微美全息将进一步改进系统,以适应实际市场需求,并适用于当前的工业生产环境。
好了,本文到此结束,带大家了解了《微美全息开发基于增强现实控制的闭环混合信号脑机接口机械臂控制系统》,希望本文对你有所帮助!关注golang学习网公众号,给大家分享更多科技周边知识!
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
191 收藏
-
299 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · mcp · ai agent · 工具接入 · 安全审计 · AI Agent MCP Model Context Protocol 工具清单 资源上下文 权限审计378 收藏
-
195 收藏
-
453 收藏
-
202 收藏
-
419 收藏
-
170 收藏
-
475 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · tracing · ai agent · 可观测性 · 工具调用 · 可观测性 AI Agent Tracing 工具调用 OpenAI Agents SDK292 收藏
-
379 收藏
-
394 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习
-

- 冷傲的鞋子
- 太全面了,收藏了,感谢作者的这篇博文,我会继续支持!
- 2023-06-19 10:53:56
-
- 可爱的飞鸟
- 很棒,一直没懂这个问题,但其实工作中常常有遇到...不过今天到这,帮助很大,总算是懂了,感谢楼主分享技术贴!
- 2023-06-08 00:57:57
-
- 成就的灰狼
- 这篇技术文章太及时了,细节满满,太给力了,已加入收藏夹了,关注楼主了!希望楼主能多写科技周边相关的文章。
- 2023-05-30 06:34:05