哈尔滨工业大学联合开发!微纳机器人在血液里“跑得快”“停得住”
来源:搜狐
时间:2023-05-30 22:07:38 407浏览 收藏
欢迎各位小伙伴来到golang学习网,相聚于此都是缘哈哈哈!今天我给大家带来《哈尔滨工业大学联合开发!微纳机器人在血液里“跑得快”“停得住”》,这篇文章主要讲到等等知识,如果你对科技周边相关的知识非常感兴趣或者正在自学,都可以关注我,我会持续更新相关文章!当然,有什么建议也欢迎在评论留言提出!一起学习!
记者从哈尔滨工业大学获悉,近日,机器人技术与系统全国重点实验室、哈尔滨医科大学第一附属医院等联合开发出仿水熊虫医用微纳机器人,可实现在静脉血高速流环境中可控运动及靶向驻停,相关成果以《可在血管中靶向驻停的仿水熊虫医用微纳机器人》为题,发表在《科学进展》上。该成果被《自然》杂志以“仿熊水蚤爪形结构为微型机器人提供牢固附着能力”的标题报道,成为该研究领域的亮点。
微纳机器人有望在药物靶向递送领域获得重大突破,因为它们具有小巧、轻便、推重比高等特点。然而,多年来却因面临如何实现在血液高流速环境下高效驱动、如何实现循环系统内靶向释放等挑战而无法在医学上应用。
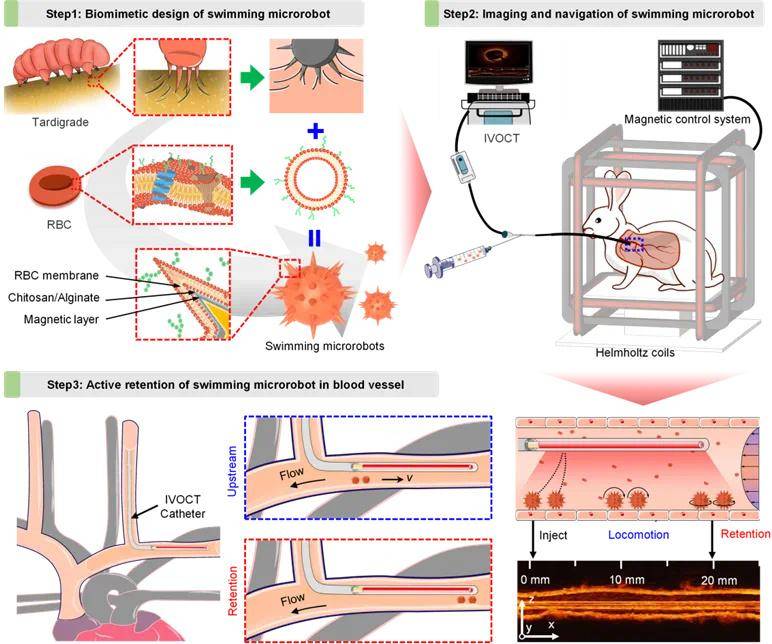
仿水熊虫医用微纳机器人工作原理 图片由哈工大提供
针对上述问题,研究团队设计了一种仿水熊虫医用微纳机器人,可以让机器人“跑得更快”,其模仿缓步动物水熊虫利用爪子在动态环境中的运动方式设计了爪形表面结构,以提高微纳机器人的驱动效率,实现了让直径20微米的机器人可在20000微米/秒的静脉血流环境中高效运动。为让机器人“停得住”,团队通过多磁场复合调控技术,实现了微纳机器人在生物组织表面可控驻停及药物靶向释放,驻停时间大于36小时。这项研究为恶性肿瘤的精准治疗提供了新的方向,可以显著提高药物的靶向递送效率。
据悉,哈工大为论文第一单位。该研究得到了来自国家重点研发计划、国家自然科学基金、哈工大医工理交叉基金等项目的经费支持。
龙头新闻·生活报 记者:吕晓艳
理论要掌握,实操不能落!以上关于《哈尔滨工业大学联合开发!微纳机器人在血液里“跑得快”“停得住”》的详细介绍,大家都掌握了吧!如果想要继续提升自己的能力,那么就来关注golang学习网公众号吧!
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
191 收藏
-
299 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · mcp · ai agent · 工具接入 · 安全审计 · AI Agent MCP Model Context Protocol 工具清单 资源上下文 权限审计378 收藏
-
195 收藏
-
453 收藏
-
202 收藏
-
419 收藏
-
170 收藏
-
475 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · tracing · ai agent · 可观测性 · 工具调用 · 可观测性 AI Agent Tracing 工具调用 OpenAI Agents SDK292 收藏
-
379 收藏
-
394 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习