JetsonSegNet语义分割实战教程
时间:2025-12-26 15:27:51 137浏览 收藏
怎么入门科技周边编程?需要学习哪些知识点?这是新手们刚接触编程时常见的问题;下面golang学习网就来给大家整理分享一些知识点,希望能够给初学者一些帮助。本篇文章就来介绍《Jetson SegNet:深度语义分割实践指南》,涉及到,有需要的可以收藏一下
在人工智能和计算机视觉领域,语义分割是一项至关重要的技术,它不仅能识别图像中的物体,还能理解每个像素所属的类别。NVIDIA Jetson 平台为开发和部署高性能的AI应用提供了强大的支持。本文将深入探讨如何利用 Jetson 平台上的 SegNet 进行语义分割,揭示其背后的原理、实际应用,并提供实践指导。
核心要点
语义分割概念:理解图像像素级别的分类。
SegNet架构:了解其编码器-解码器结构。
NVIDIA Jetson平台:掌握在嵌入式设备上部署AI模型的优势。
SegNet在Jetson上的应用:探索实际应用案例。
性能优化:学习如何在Jetson平台上优化SegNet的性能。
语义分割与SegNet:深度解析
什么是语义分割?
语义分割,作为图像识别领域的高级技术,旨在理解图像场景并识别每个像素所属的类别。与传统的图像识别不同,语义分割不仅仅是将图像分类为一个整体,而是对图像中的每个像素进行分类,从而实现对图像更精细的理解。
这种技术在自动驾驶、医疗影像分析、机器人视觉等领域有着广泛的应用前景。
语义分割的核心在于它能够将图像划分为有意义的区域,并为每个区域分配一个类别标签。例如,在自动驾驶场景中,语义分割可以区分道路、行人、车辆等不同的元素,为车辆的决策提供更丰富的信息。
与目标检测的区别: 虽然目标检测也能识别图像中的物体,但它主要关注的是物体的边界框(bounding box),而语义分割则更进一步,它关注的是每个像素的类别,从而提供更精细的分割结果。
应用场景:
- 自动驾驶:识别道路、行人、车辆等,提高驾驶安全性。
- 医疗影像分析:辅助医生进行肿瘤检测、病灶分割等。
- 机器人视觉:帮助机器人理解周围环境,实现自主导航和操作。
- 增强现实:实现虚拟物体与真实场景的融合。
SegNet架构详解
SegNet 是一种常被使用的深度学习网络架构,专为语义分割任务而设计。它采用编码器-解码器结构,其中编码器负责提取图像的特征,解码器则负责将这些特征映射回像素级别的分类结果。
编码器部分:通常由一系列卷积层和池化层组成,用于逐步提取图像的特征。卷积层负责学习图像的局部模式,而池化层则用于降低特征图的分辨率,减少计算量并提高鲁棒性。
解码器部分:与编码器相对应,解码器使用上采样(upsampling)操作将低分辨率的特征图恢复到原始图像的分辨率。此外,解码器还会利用编码器中提取的特征进行融合,从而提高分割的精度。
关键特点:
- 编码器-解码器结构:有效提取特征并恢复分辨率。
- 上采样操作:恢复像素级别的分类结果。
- 特征融合:提高分割精度。
SegNet 的这种架构使其能够有效地处理语义分割任务,并在各种场景中取得良好的性能。
NVIDIA Jetson:AI嵌入式开发的强大平台
NVIDIA Jetson 是一系列嵌入式计算系统,专为在边缘设备上运行 AI 工作负载而设计。这些平台集成了 NVIDIA 的 GPU 技术,提供强大的计算能力,同时保持了较低的功耗,非常适合于在资源受限的环境中部署 AI 模型。
Jetson平台的优势:
- 高性能计算:NVIDIA GPU 提供强大的并行计算能力,加速 AI 模型的推理。
- 低功耗设计:适用于电池供电或功耗敏感的应用场景。
- 丰富的开发工具:NVIDIA 提供了一整套开发工具,简化 AI 模型的开发和部署过程。
Jetson Nano, Jetson Xavier NX, and Jetson AGX Orin: Jetson系列有不同的型号,例如 Jetson Nano、Jetson Xavier NX 和 Jetson AGX Orin,分别针对不同的应用场景和性能需求。Jetson Nano 适合于入门级的 AI 项目,而 Jetson AGX Orin 则提供更高的计算能力,适用于复杂的 AI 应用。
JetPack SDK: NVIDIA JetPack SDK 包含了用于在 Jetson 平台上开发 AI 应用的各种工具和库,例如 CUDA、TensorRT 和 cuDNN,可以帮助开发者优化模型性能并加速推理过程。
SegNet 在 Jetson 上的实践指南
安装必要的软件和库
在 Jetson 平台上使用 SegNet 之前,需要安装一些必要的软件和库,包括 JetPack SDK、TensorFlow 或 PyTorch。
- JetPack SDK: 包含了 CUDA、TensorRT 和 cuDNN 等组件,用于加速 GPU 计算。
- TensorFlow 或 PyTorch: 流行的深度学习框架,用于构建和训练 SegNet 模型。
以下是安装步骤的简要概述:
-
下载和安装 JetPack SDK:访问 NVIDIA 开发者网站,下载适用于你的 Jetson 型号的 JetPack SDK,并按照官方文档进行安装。
-
安装 TensorFlow 或 PyTorch:根据你的项目需求选择合适的深度学习框架,并按照官方文档进行安装。建议使用 NVIDIA 提供的 TensorFlow 或 PyTorch 版本,以获得更好的 GPU 加速效果。
-
安装其他依赖库:根据 SegNet 模型的代码需求,安装其他必要的依赖库,例如 OpenCV、NumPy 等。
准备数据集
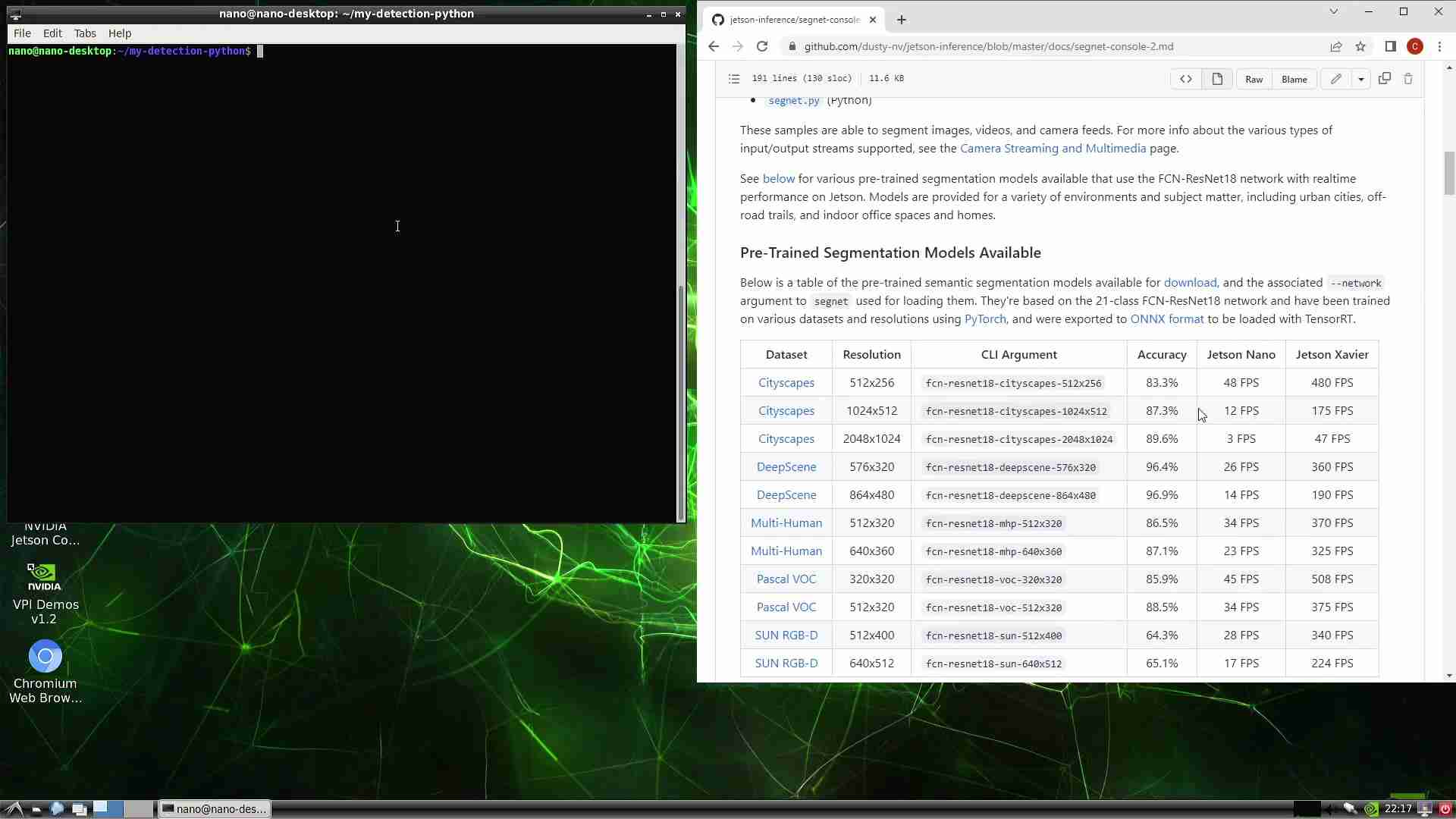
在训练 SegNet 模型之前,需要准备一个包含标注信息的图像数据集。常用的语义分割数据集包括 Cityscapes、Pascal VOC 和 ADE20K。
- Cityscapes:用于城市街景的语义分割,包含 5000 张带有像素级别标注的图像。
- Pascal VOC:包含 20 个类别的图像,用于目标检测和语义分割。
- ADE20K:包含 150 个类别的室内和室外场景图像,用于场景理解。
数据预处理:在训练模型之前,需要对数据集进行预处理,包括图像缩放、归一化和数据增强。数据增强可以通过随机旋转、翻转和裁剪等方式增加数据集的多样性,从而提高模型的泛化能力。
数据标注:对于没有标注信息的数据集,需要手动或使用半自动化的工具进行标注。标注工具例如 Labelme, ENet, Supervisely等。
构建和训练 SegNet 模型
使用 TensorFlow 或 PyTorch 构建 SegNet 模型,并使用准备好的数据集进行训练。
可以使用预训练权重来加速训练过程,并提高模型的性能。
模型构建:
- 定义 SegNet 架构:使用 TensorFlow 或 PyTorch 定义 SegNet 的编码器-解码器结构,包括卷积层、池化层、上采样层等。
- 加载预训练权重:如果使用预训练权重,从 ImageNet 等大型数据集上预先训练好的权重加载到 SegNet 模型中。
模型训练:
- 定义损失函数和优化器:语义分割任务常用的损失函数包括交叉熵损失和 Dice 损失,可以使用 Adam 或 SGD 等优化器进行优化。
- 设置训练参数:设置训练的 epoch 数、batch size 和学习率等参数。
- 开始训练:使用训练数据集对 SegNet 模型进行训练,并使用验证数据集进行验证。
训练技巧:
- 使用预训练权重:加速训练过程,提高模型性能。
- 数据增强:增加数据集的多样性,提高模型的泛化能力。
- 学习率调整:根据训练情况调整学习率,避免过拟合或欠拟合。
在 Jetson 平台上部署 SegNet 模型
训练完成后,将 SegNet 模型部署到 Jetson 平台上,并进行性能优化。可以使用 NVIDIA TensorRT 来加速模型的推理过程。
模型转换:
- 将模型转换为 TensorRT 格式:使用 NVIDIA 提供的工具将 TensorFlow 或 PyTorch 模型转换为 TensorRT 格式。
性能优化:
- 量化:使用量化技术降低模型的精度,减少计算量并提高推理速度。
- 剪枝:使用剪枝技术减少模型的参数数量,降低模型的大小和计算复杂度。
- Kernel 融合:可以手动或自动地将多个kernel合并成一个kernel, 达到优化的作用。
模型部署:
- 将转换后的模型部署到 Jetson 平台:使用 Jetson 平台的推理引擎加载转换后的 TensorRT 模型,并进行推理。
注意事项:
- 根据 Jetson 平台的计算能力选择合适的模型大小和精度。
- 使用性能分析工具评估模型的性能,并进行相应的优化。
- 关注模型的功耗,并进行功耗优化。
SegNet实战:图像语义分割详细步骤
步骤一:准备工作环境
首先,需要确保你的 Jetson 平台已经安装了 JetPack SDK 和 TensorFlow 或 PyTorch。 此外,还需要安装一些常用的 Python 库,例如 OpenCV 和 NumPy。
sudo apt-get update
sudo apt-get install python3-pip
pip3 install opencv-python numpy检查是否安装成功:
import cv2
import numpy as np
print("OpenCV version:", cv2.__version__)
print("NumPy version:", np.__version__)步骤二:下载 SegNet 模型代码
从 GitHub 上下载 SegNet 模型的代码,或者使用你自己的 SegNet 模型代码。
git clone https://github.com/jetson-inference/segnet-console.git
cd segnet-console步骤三:准备测试图像
准备一些用于测试的图像,并将其放置在代码目录下的 images/ 文件夹中。
确保图像格式为 JPG 或 PNG。
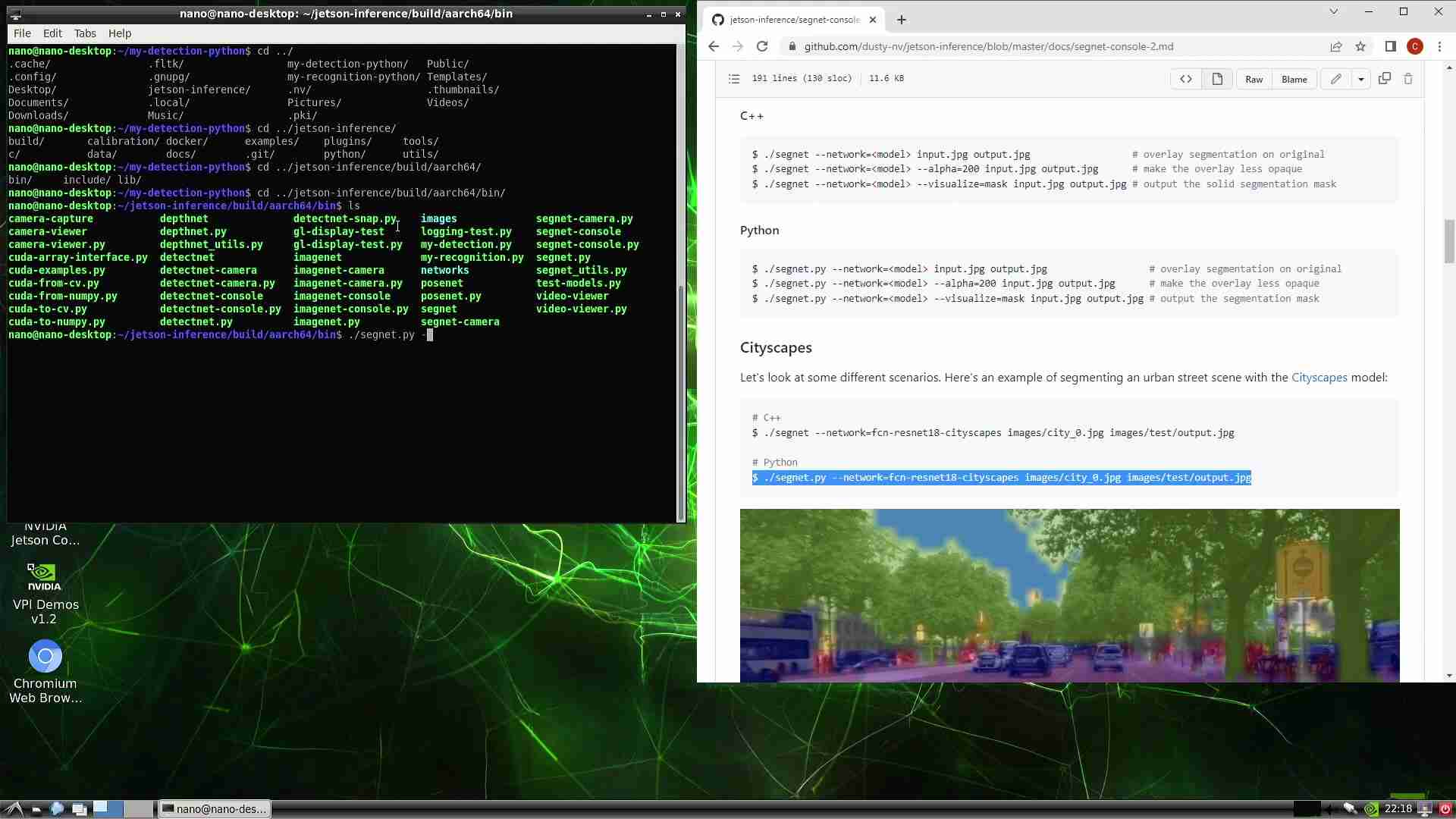
步骤四:运行 SegNet 推理
使用以下命令在 Jetson 平台上运行 SegNet 推理:
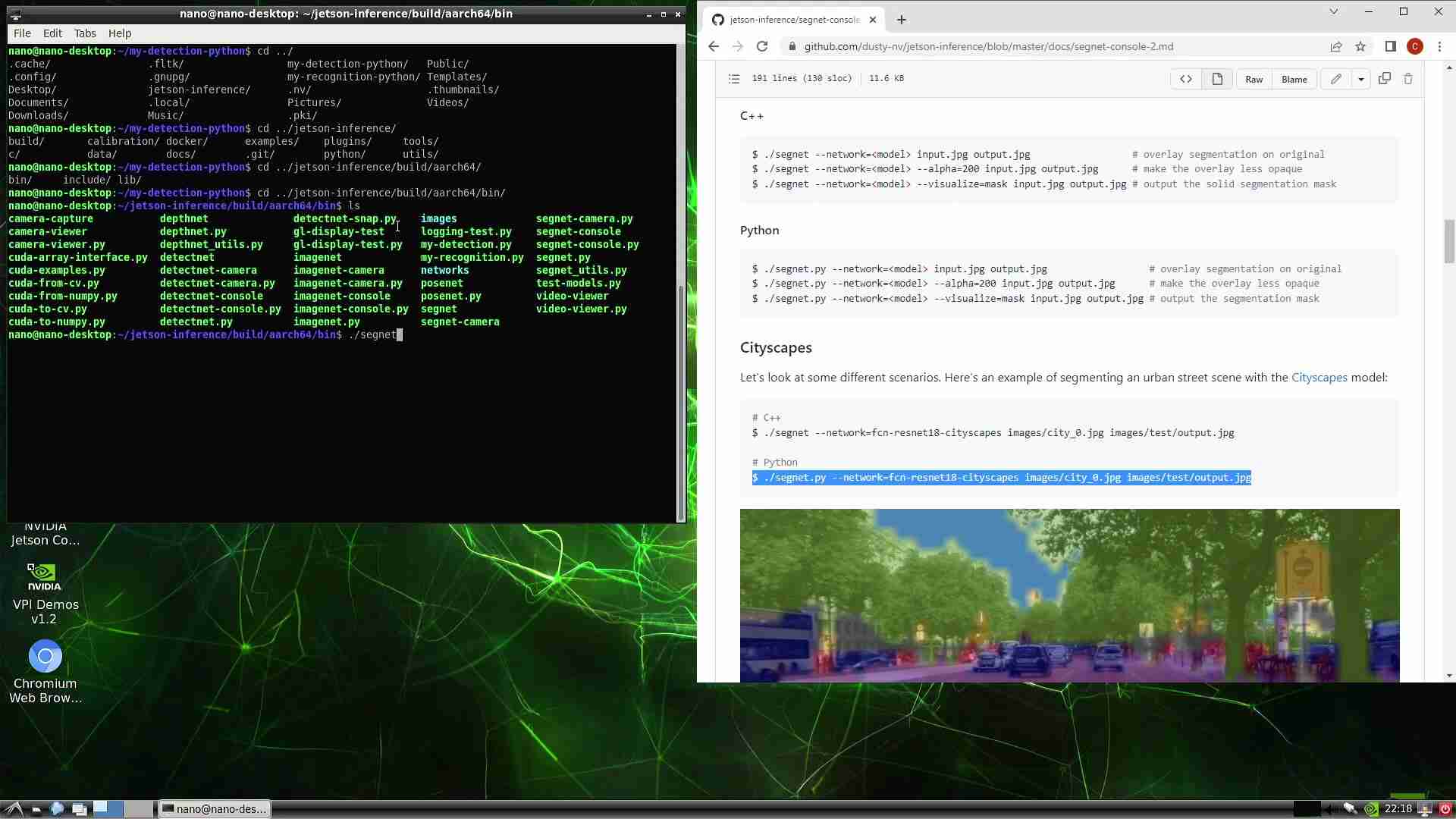
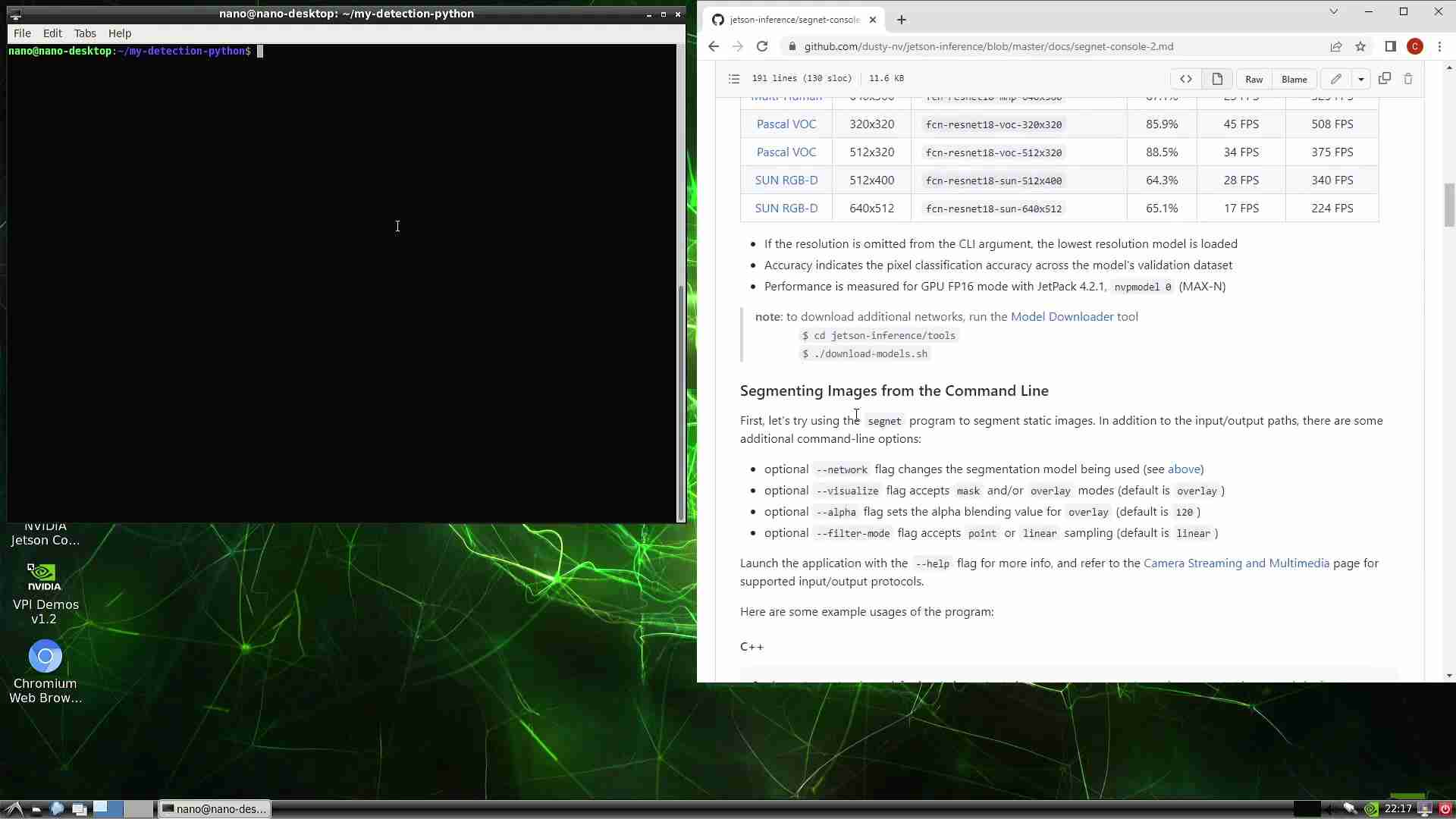
./segnet --network images/ images/ 其中 fcn-resnet18-cityscapes-512x256,
./segnet --network= input.jpg output.jpg 使用预训练模型示例:
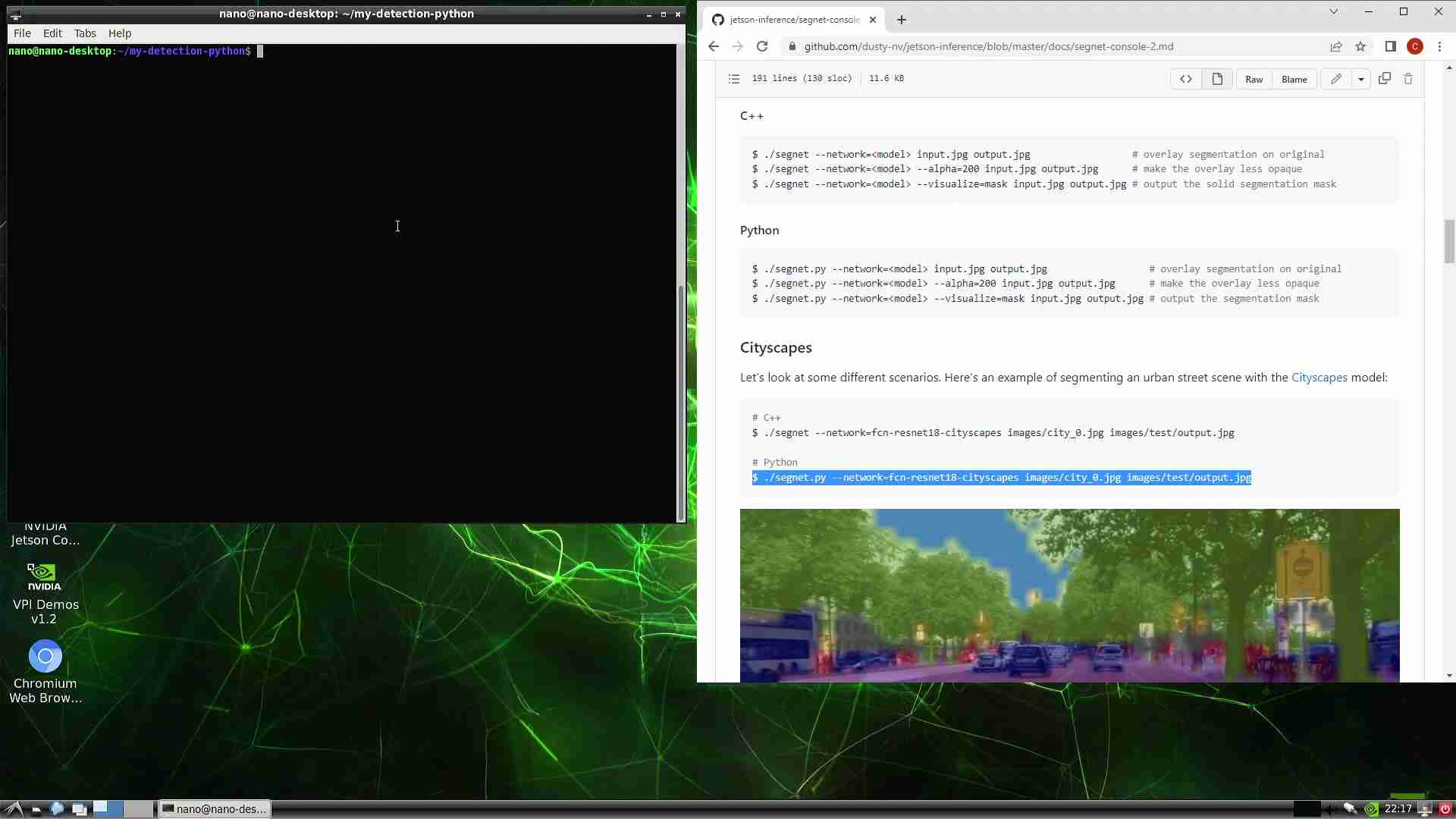
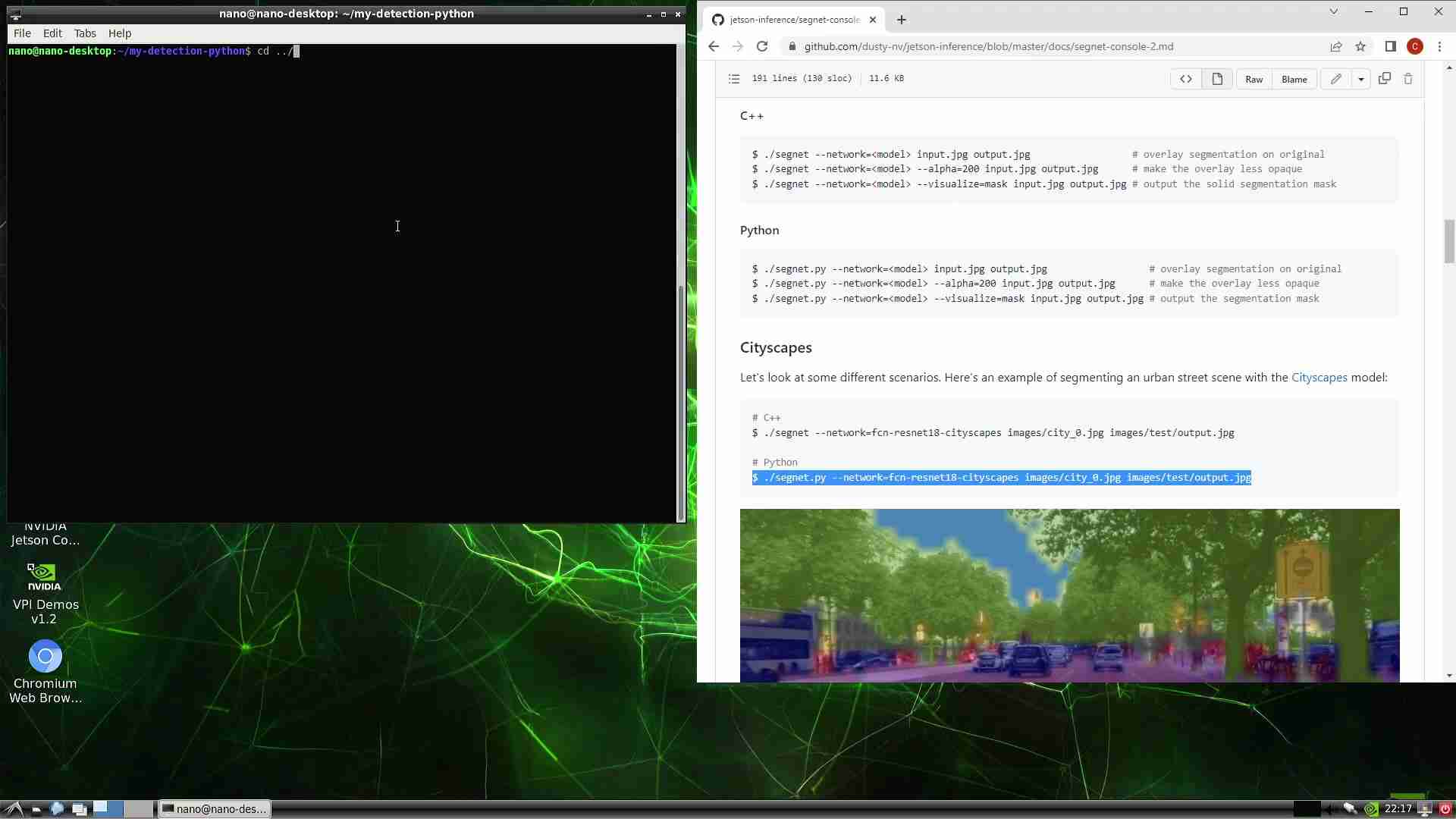
./segnet --network=fcn-resnet18-cityscapes-512x256 images/city_0.jpg images/test/output.jpg解释: 此命令使用fcn-resnet18-cityscapes-512x256网络对images目录中的city_0.jpg图片执行分段, 并将结果输出保存到images/test/output.jpg文件。
步骤五:查看分割结果
推理完成后,可以在代码目录下的 images/ 文件夹中找到分割结果图像。使用图像查看器打开结果图像,查看分割效果。
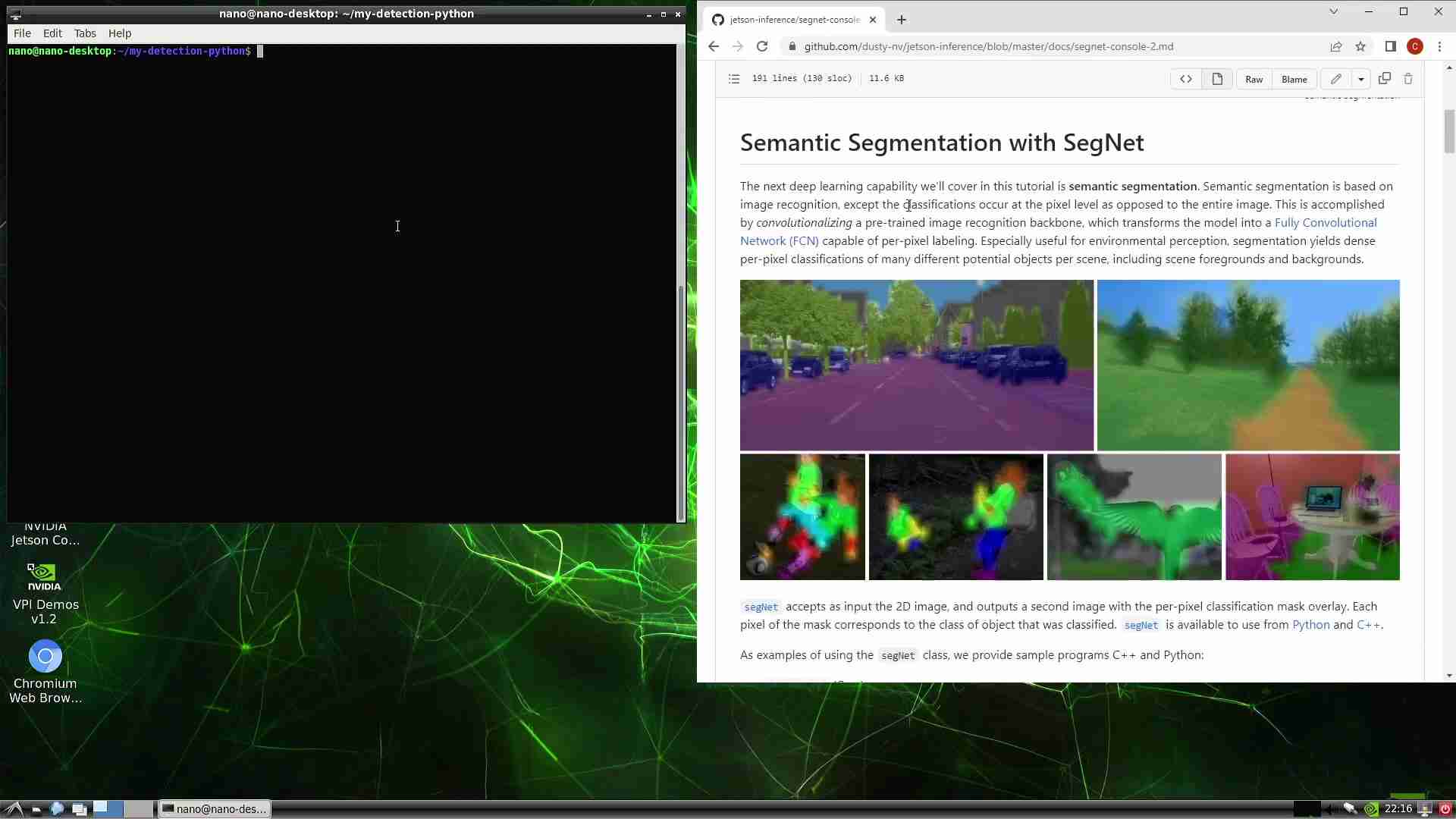
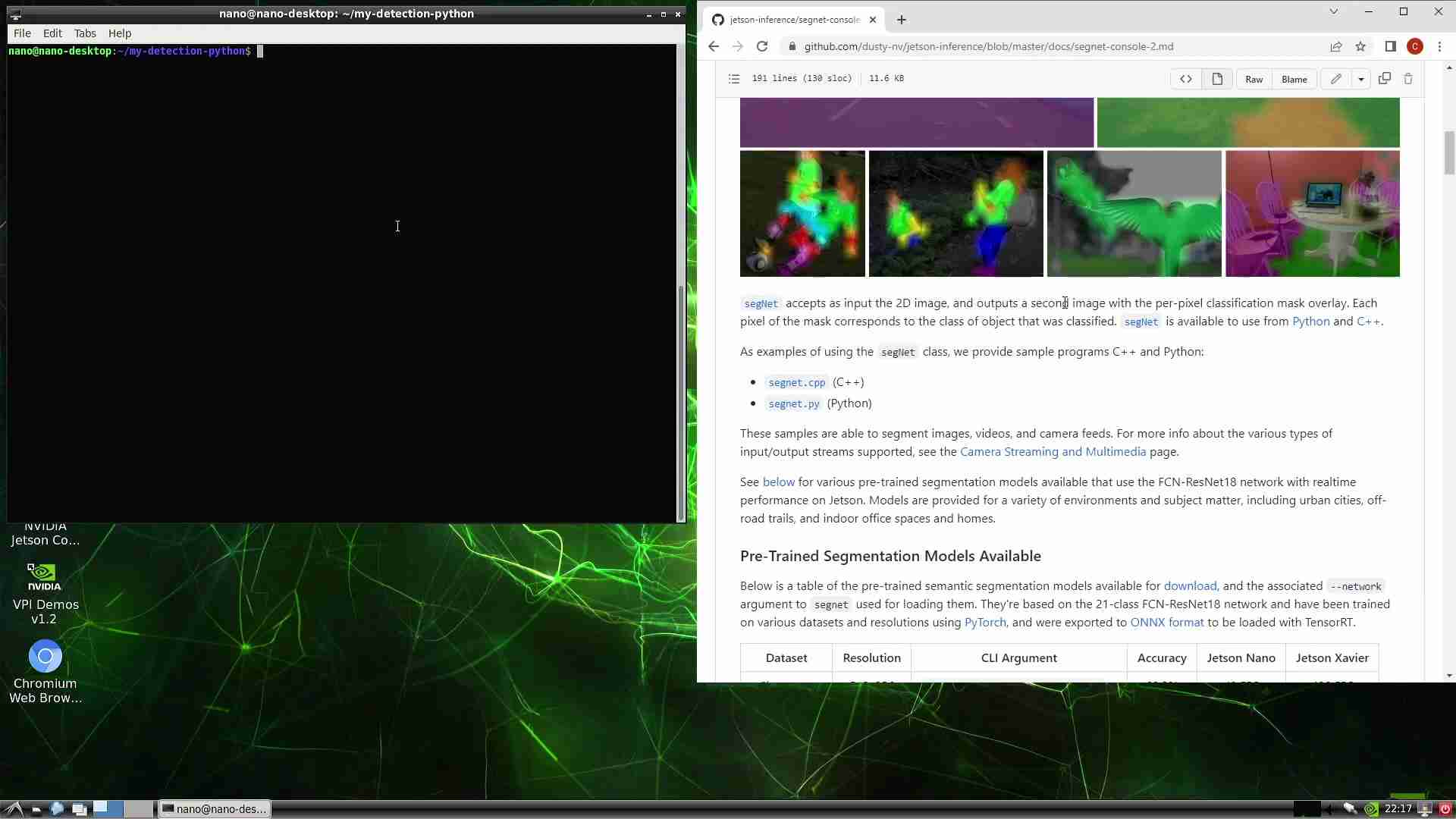
结果图像将显示原始图像以及语义分割的叠加层,不同的颜色代表不同的类别。 可以使用浏览器打开查看效果。
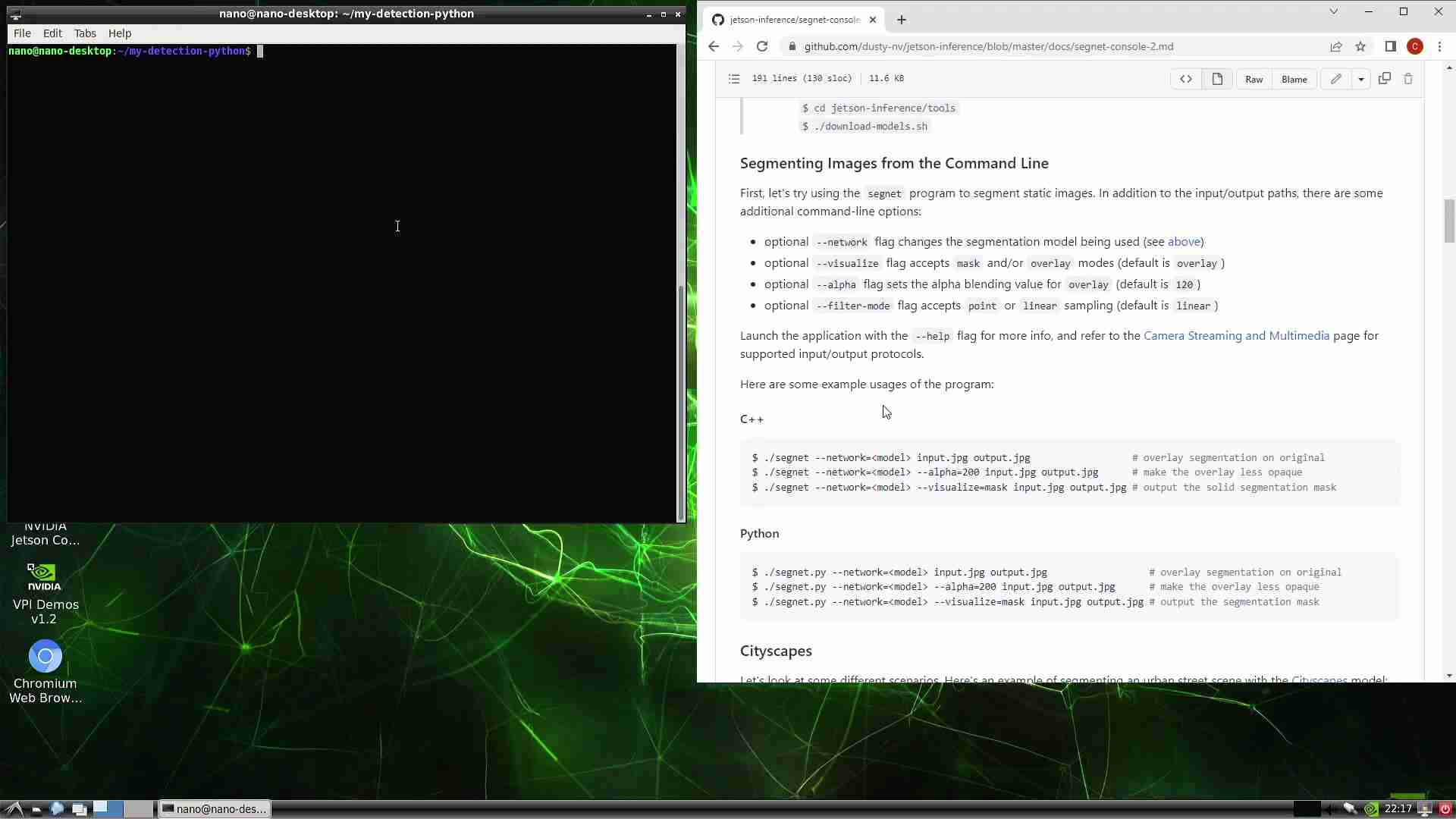
可选项:
可选标志接受蒙版和/或覆盖模式(默认是覆盖)。
--visualize=: 可视化标志接受蒙版和/或覆盖模式(默认是覆盖)。--alpha=NUM: alpha 标志设置 alpha 混合值以进行覆盖(默认值为 120)。--filter-mode=: filter-mode 标志接受点或线性采样(默认是线性)。
SegNet Semantic Segmentation的优势与挑战
? Pros擅长精细分割:SegNet 能够实现像素级别的图像分类,提供比传统目标检测更精细的结果,适用于需要精确边界识别的应用场景。
环境感知能力强:通过识别道路、行人、车辆等元素,SegNet 增强了自动驾驶系统对周围环境的理解。
医疗影像分析:SegNet可准确进行肿瘤检测,并分割病灶。
深度学习加速技术:得益于 Jetson 平台的 CUDA、TensorRT 和 cuDNN 支持,SegNet 可以实现高性能的 AI 模型推理。
适应资源有限的环境:Jetson 平台的低功耗设计使得 SegNet 可以在嵌入式设备和移动平台等资源受限的环境中有效部署。
? Cons依赖高质量数据集: SegNet 的性能高度依赖于训练数据的质量和数量,标注不足或偏差的数据集可能导致模型性能下降。
计算资源需求高: 训练深度学习模型需要大量的计算资源,包括 GPU 和内存,这可能会增加开发成本和时间。
对计算能力有要求: 虽然Jetson平台已经很强大,但是仍然有他的限制,例如GPU和算力等,根据 Jetson 平台的计算能力,需要选择合适的模型大小和精度。
过拟合风险: 如果训练数据不足或模型过于复杂,SegNet 可能会出现过拟合现象,导致在训练数据上表现良好,但在实际应用中性能下降。
常见问题解答
SegNet的语义分割原理是什么?
SegNet的语义分割通过编码器-解码器结构实现,编码器提取图像特征,解码器将特征映射回像素级别的分类结果,从而理解图像场景并识别每个像素所属类别。SegNet使用上采样操作恢复分辨率,并融合编码器特征以提高分割精度。
NVIDIA Jetson在语义分割中扮演什么角色?
NVIDIA Jetson平台专为在边缘设备上运行AI工作负载而设计,集成了NVIDIA的GPU技术,提供强大的计算能力和较低的功耗,非常适合在资源受限的环境中部署AI模型。Jetson Nano、Xavier NX和AGX Orin等型号满足不同应用场景的需求。
有哪些常用的语义分割数据集?
常用的语义分割数据集包括Cityscapes、Pascal VOC和ADE20K。 Cityscapes用于城市街景分割,Pascal VOC包含20个类别的图像,ADE20K包含室内和室外场景图像,用于场景理解。
如何优化SegNet在Jetson上的性能?
可以通过量化和剪枝技术优化SegNet在Jetson上的性能。量化降低模型精度以减少计算量,剪枝减少模型参数数量以降低计算复杂度。使用CUDA进行并行计算优化也是很重要的一环。
有哪些常用的图像标注工具?
常用的图像标注工具例如 Labelme, ENet, Supervisely等等。Labelme是一个图形化的图像标注工具,它支持多种类型的标注任务。 Supervisely是一个基于Web的平台,它支持多个用户协作,从而加速了标注过程。
相关问题拓展
如何评估语义分割模型的性能?
评估语义分割模型的性能通常使用以下指标: 像素准确率(Pixel Accuracy):正确分类的像素占总像素的比例。 平均交并比(Mean Intersection over Union,mIoU):所有类别交并比的平均值。 Dice 系数(Dice Coefficient):衡量两个样本之间相似度的指标。 像素准确率 衡量的是模型正确分类的像素比例,但它可能无法很好地反映类别不平衡的情况。平均交并比 是更常用的评估指标,它考虑了每个类别的分割结果,从而对类别不平衡的情况更加鲁棒。Dice系数则是一种衡量两个样本相似度的指标,可以用于评估分割结果的质量。
语义分割在自动驾驶中的应用有哪些?
语义分割在自动驾驶中有着广泛的应用,例如: 道路分割:区分道路和非道路区域,为车辆提供可行驶区域的信息。 行人检测:识别行人,提高驾驶安全性。 车辆检测:识别周围车辆,避免碰撞。 交通标志识别:识别交通标志,为车辆提供驾驶辅助信息。 语义分割可以为自动驾驶车辆提供更丰富、更精细的环境感知信息,从而提高驾驶的安全性和可靠性。
文中关于的知识介绍,希望对你的学习有所帮助!若是受益匪浅,那就动动鼠标收藏这篇《JetsonSegNet语义分割实战教程》文章吧,也可关注golang学习网公众号了解相关技术文章。
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
191 收藏
-
299 收藏
-
科技周边 · 人工智能 | 6天前 | 人工智能 · mcp · ai agent · 工具接入 · 安全审计 · AI Agent MCP Model Context Protocol 工具清单 资源上下文 权限审计378 收藏
-
195 收藏
-
453 收藏
-
202 收藏
-
419 收藏
-
170 收藏
-
475 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · tracing · ai agent · 可观测性 · 工具调用 · 可观测性 AI Agent Tracing 工具调用 OpenAI Agents SDK292 收藏
-
379 收藏
-
394 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习