SupFusion:港中文最新用于3D检测的LV融合新SOTA!
来源:51CTO.COM
时间:2023-09-26 11:00:49 334浏览 收藏
哈喽!大家好,很高兴又见面了,我是golang学习网的一名作者,今天由我给大家带来一篇《SupFusion:港中文最新用于3D检测的LV融合新SOTA!》,本文主要会讲到等等知识点,希望大家一起学习进步,也欢迎大家关注、点赞、收藏、转发! 下面就一起来看看吧!
标题:SupFusion:基于监督学习的LiDAR-相机融合用于3D物体检测
论文链接:https://arxiv.org/pdf/2309.07084.pdf
香港中文大学 NIO 是作者的单位
代码链接:https://github.com/IranQin/SupFusion
会议:ICCV 2023
论文思路
近年来,许多融合LiDAR-Camera的三维检测方法出现,并且在实现自动驾驶方面扮演着关键角色。然而,这些方法虽然在性能上与单模态检测器相比有着前途,但却一直缺乏对融合过程的精心设计和有效的监督
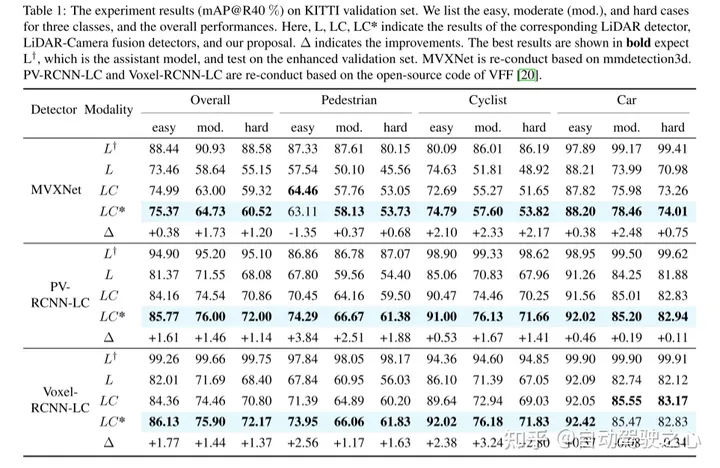
本文提出了一种新的训练策略SupFusion,该策略为有效的LiDAR-Camera融合提供了辅助特征级监督,显著提高了检测性能。本文的策略涉及到一种称为极坐标采样(Polar Sampling)的数据增强方法,它对稀疏的目标进行加密,并训练一个辅助模型生成高质量的特征作为监督。然后利用这些特征训练LiDAR-Camera融合模型,对融合特征进行优化,以模拟生成的高质量特征。此外,本文提出了一种简单而有效的深度融合模块(deep fusion module),与已有的基于SupFusion策略的融合方法相比,该模块具有连续的优越性能。这样看来,本文的提出的方法有以下优点。首先,SupFusion引入了辅助特征级监督,可以在不引入额外推理成本的情况下提高LiDAR-Camera的检测性能。其次,提出的深度融合可以不断提高检测器的能力。本文提出的SupFusion和deep fusion模块是即插即用的,本文进行了大量的实验来证明其有效性。具体来说,基于多个 LiDAR-Camera 3D 检测器,本文在 KITTI 基准上获得了约 2% 的 3D mAP 改进。
主要贡献
本文提出了一种名为 SupFusion 的新型监督融合训练策略,该策略主要由高质量特征生成过程组成,并据本文所知,首先提出辅助特征级监督损失,以实现鲁棒融合特征提取和准确的 3D 检测。
为了在SupFusion中获得高质量的特征,本研究提出了一种极坐标采样的数据增强方法,用于对稀疏目标进行加密。另外,本研究还提出了一种高效的深度融合模块,以提高连续检测的精度
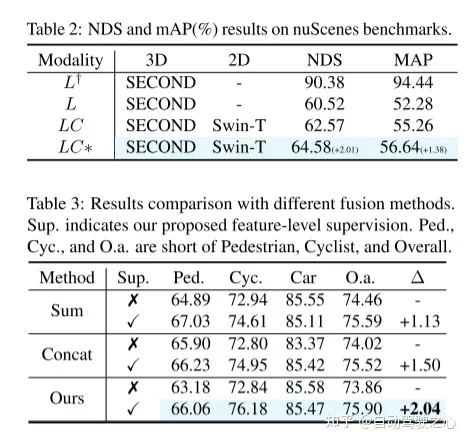
在这篇文章中,我们进行了大量实验,使用了不同的融合策略来测试多个检测器。在KITTI基准上,我们成功提高了约2%的mAP
网络设计
本文介绍了一种名为SupFusion的有监督LiDAR-Camera融合方法,旨在生成高质量特征并为融合和特征提取过程提供有效的监督,从而进一步提高基于LiDAR-Camera融合的3D检测性能。具体而言,本文首先训练了一个辅助模型,以提供高质量的特征。为了实现这一目标,本文提出了一种新型的数据增强方法,称为极坐标采样。极坐标采样可以从稀疏的激光雷达数据中动态增强物体的密度,从而更容易检测并提高特征质量,例如准确的检测结果。然后,本文通过引入辅助特征级监督,简单地训练了基于LiDAR-Camera融合的检测器。在这一步骤中,原始的LiDAR和摄像机输入被输入到3D/2D主干和融合模块中,以获得融合特征。一方面,融合特征被输入到检测头进行最终预测,即决策级监督。另一方面,辅助监督将融合特征模拟为高质量特征,这些特征是通过预训练的辅助模型和增强的激光雷达数据获得的。通过这种方式,所提出的特征级监督可以使融合模块生成更鲁棒的特征,并进一步提高检测性能。为了更好地融合LiDAR和摄像机特征,本文提出了一种简单而有效的深度融合模块,该模块由堆叠的MLP块和动态融合块组成。SupFusion可以充分发挥深度融合模块的能力,不断提高检测精度
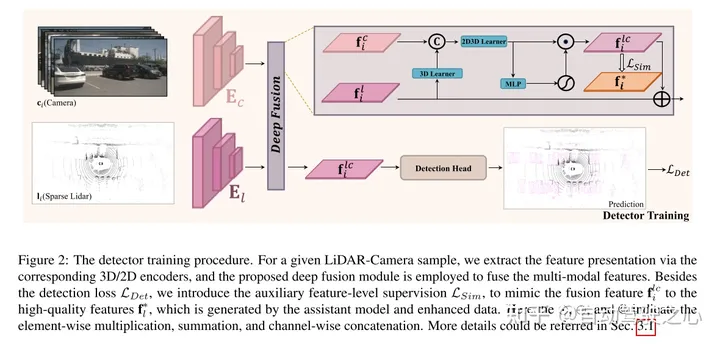
图2:检测器训练过程。对于给定的LiDAR-Camera样本,本文通过相应的3D/2D编码器提取特征表示,并使用提出的深度融合模块融合多模态特征。除了检测损失的 外,本文 提出辅助特征级监督 ,将融合的特征 模拟成高质量的特征 ,这是由辅助模型和增强数据生成的。
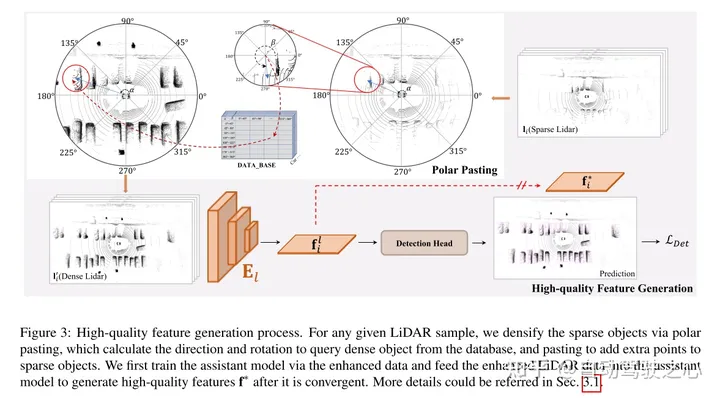
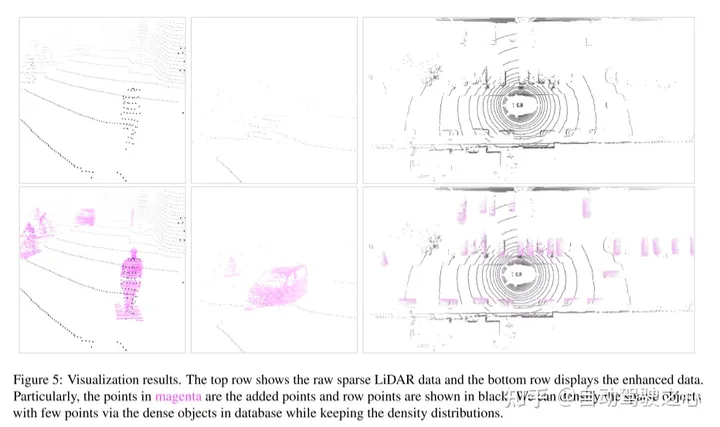
图3:高质量的特征生成过程。对于任意给定的LiDAR样本,本文通过 polar pasting 对稀疏目标进行加密,polar pasting计算从数据库中查询稠密目标的方向和旋转,并通过粘贴向稀疏目标添加额外的点。本文首先通过增强的数据训练辅助模型,并将增强的LiDAR数据输入辅助模型中,以生成高质量的特征 ,直到它被收敛。
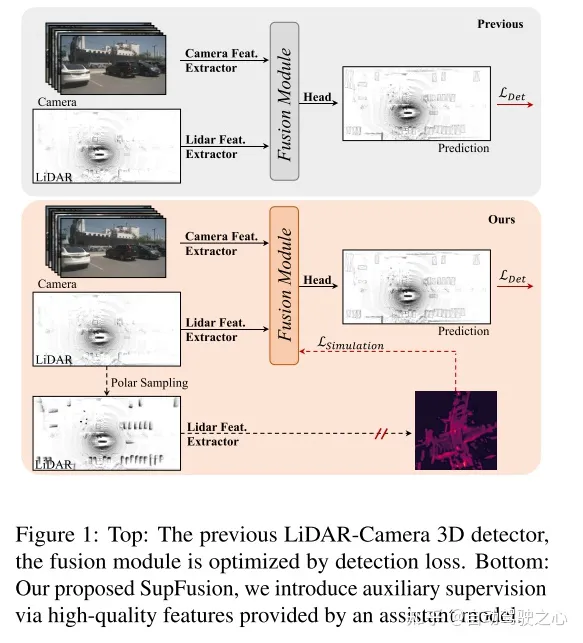
图1:上图:之前的LiDAR-Camera 3D检测器,通过检测损失对融合模块进行优化。底部:本文提出的SupFusion,本文提出了通过一个辅助模型提供的高质量特征的辅助监督。
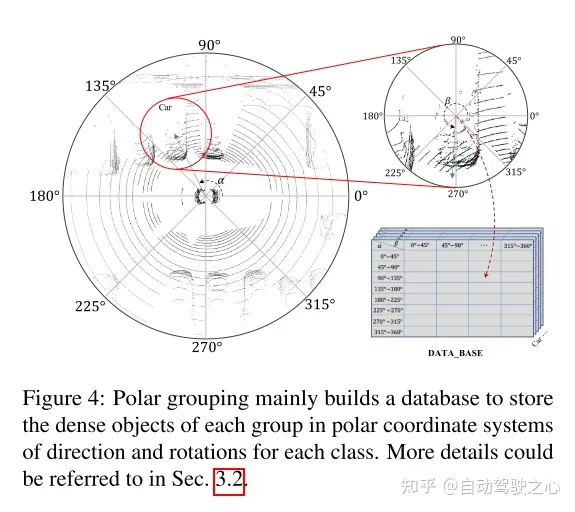
图4:Polar grouping主要是建立一个数据库,将每个组的密集目标存储在每个类的方向和旋转的极坐标系系统中。
实验结果
引用
Qin, Y., Wang, C., Kang, Z., Ma, N., Li, Z., & Zhang, R. (2023). SupFusion: Supervised LiDAR-Camera Fusion for 3D Object Detection. ArXiv. /abs/2309.07084

需要进行改写的内容是:原文链接:https://mp.weixin.qq.com/s/-pPUtrlfeo_09svMxk2qFA
终于介绍完啦!小伙伴们,这篇关于《SupFusion:港中文最新用于3D检测的LV融合新SOTA!》的介绍应该让你收获多多了吧!欢迎大家收藏或分享给更多需要学习的朋友吧~golang学习网公众号也会发布科技周边相关知识,快来关注吧!
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
191 收藏
-
299 收藏
-
科技周边 · 人工智能 | 3天前 | 人工智能 · mcp · ai agent · 工具接入 · 安全审计 · AI Agent MCP Model Context Protocol 工具清单 资源上下文 权限审计378 收藏
-
195 收藏
-
453 收藏
-
202 收藏
-
419 收藏
-
170 收藏
-
475 收藏
-
科技周边 · 人工智能 | 1星期前 | 人工智能 · tracing · ai agent · 可观测性 · 工具调用 · 可观测性 AI Agent Tracing 工具调用 OpenAI Agents SDK292 收藏
-
379 收藏
-
394 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习