微软研究AR/VR领域,致力于解决左右眼立体图像对齐的问题
来源:搜狐
时间:2023-10-31 23:43:30 408浏览 收藏
从现在开始,我们要努力学习啦!今天我给大家带来《微软研究AR/VR领域,致力于解决左右眼立体图像对齐的问题》,感兴趣的朋友请继续看下去吧!下文中的内容我们主要会涉及到等等知识点,如果在阅读本文过程中有遇到不清楚的地方,欢迎留言呀!我们一起讨论,一起学习!
在对于呈现立体图像的XR头显中,任何图像显示时存在的立体错位都可能会影响用户体验,甚至会引起恶心。因此,有必要进行对齐评估。微软在名为“Head-mounted display alignment assessment”和“Stereo alignment assessment for head-mounted display”的专利申请中提出了一种相关的对齐评估方法
3A和3B展示了头戴式显示系统组件不对齐的情况。右侧近眼显示器200R和左侧近眼显示器200L之间存在不对齐,具体来说,右侧近眼显示器偏移了约10度。因此,在图3B中,这两个显示图像不会被解析为单个的三维对象206,而是被视为两个不同的偏移图像
往好了说,这可能会分散注意力,往坏了说,这可能会给用户带来不适感和恶心感。因此,图4描述的头戴式显示系统400包括用于评估左右显示光的当前立体对齐的结构。
如图所示,用于形成显示图像的空间调制显示光操作可由逻辑机器控制406。逻辑机同时可以检测头戴式显示系统的各种组件之间的不对齐。逻辑机可以配置为评估由各自的左右显示组件提供的左右显示光的立体对齐。
这可以至少部分地基于以下分析来完成:由左和右光学传感器测量的左和右测试光,以及由左和右IMU测量的左和右显示组件的方向。
因此,可以使用头戴式显示系统400的各种结构来检测左右显示光之间的立体不对齐,从而呈现虚拟图像
示例方法500在图5中展示了用于显示系统对齐评估的示例
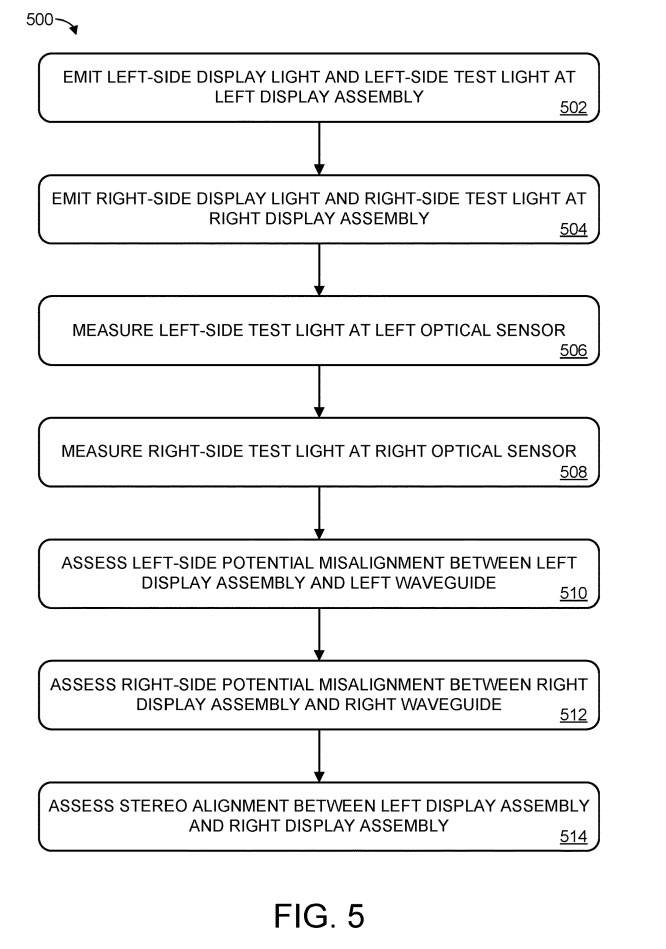
在502中,在头戴式显示系统的左侧显示组件,发射左侧显示光和左侧测试光,左侧显示光通过左侧波导耦入并耦出,以在左侧视窗查看。图6更详细地图解了左波导402L和头戴式显示系统400的相关组件。
在图6中,左显示组件404L包括用于释放左侧显示光602D的第一左瞳600D。左侧显示组件进一步包括用于释放左侧测试光602T的第二左瞳600T。
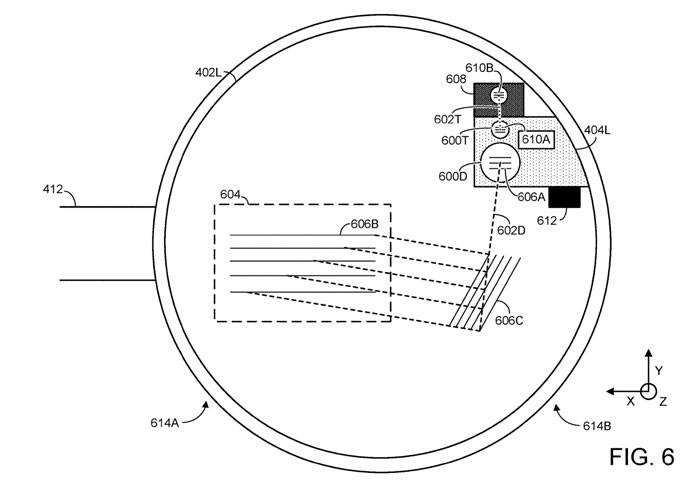
左波导402L配置为耦入来自左显示组件的左侧显示光,并将用于在左视窗604查看的左侧显示光耦出。左侧显示组件404L进一步提供左侧测试光602T。
一个实例中显示光和测试光可以来自显示组件内的单独光源,由显示组件的单独光瞳释放。在这种情况下,测试光的特性可能以任何合适的方式与显示光不同
头戴式显示系统还包括一个用于测量左侧测试光的左光学传感器608。这样,头戴式显示设备的计算机可以评估左显示组件和左波导之间可能存在的不对齐问题,从而检测到左右显示图像的立体不对齐
在图6的实施例中,左波导402L配置为将左侧测试光耦合并将左侧测试光耦出,以供左侧光学传感器感测。
通过测试光衍射光学元件610A和测试光衍射光学元件610B来实现,其中测试光衍射光学元件610A将测试光耦合到波导中,而测试光衍射光学元件610B则通过左光学传感器进行测量
另外,将左侧光学传感器608耦合到左侧显示组件。由于左侧测试光通过波导传播,左侧显示组件和波导之间的不对齐可能会影响左侧光学传感器接收左侧测试光的角度和/或位置。
在示例中的第六张图中,头戴式显示系统还包括左侧的IMU 612。左侧的IMU被配置为测量左侧显示组件的方向。可以将左侧IMU的测量值与右侧显示组件对应的右侧IMU的测量值进行比较。通过这种方式,头戴式显示系统的逻辑机可以评估左侧显示组件和右侧显示组件的相对方向和/或位置,并检测两个显示组件之间的不对齐
在图6中,左侧IMU与左侧显示组件物理耦合。通过这种方式,左侧IMU可以直接测量左侧显示组件的方向和/或位置的变化。
在一个实施例重,头戴式显示系统可以包括第二个左IMU,并配置为测量左波导的方向。在图6中,第二左IMU 613配置为测量左波导的方向。IMU 613用虚线表示,表明头戴式显示系统不需要总是包括第二个左IMU。
在使用第二个左IMU的情况下,可以省略头戴式显示系统中的左光学传感器,并且显示组件只需提供显示光,而不是显示光和测试光
回到图5,在504,头戴式显示系统的右侧显示组件发射右侧显示光和右侧测试光,右侧显示光通过右波导耦入并耦出。在一个示例中,这基本上按照上述图6的左波导描述方法完成。
图7更详细地描述了方法500的步骤504。在图7中,头戴式显示系统包括右显示组件702,右显示组件702配置为提供右侧显示光704D和右侧测试光704T。
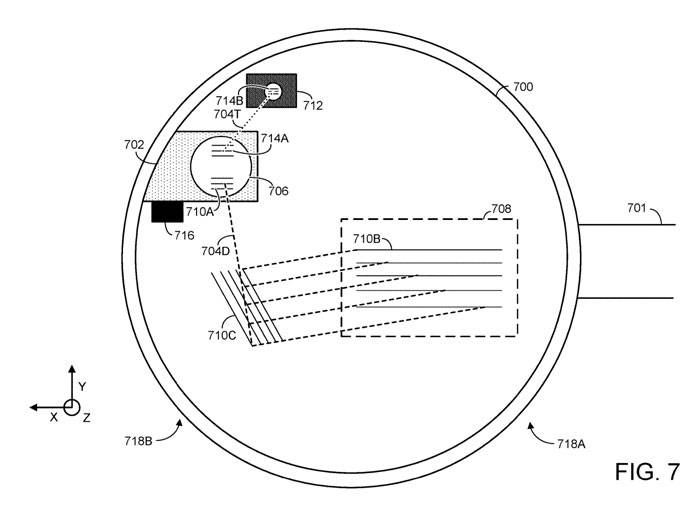
与左侧显示组件404L不同,右侧显示组件702包括共享光瞳706,用于释放右侧显示光和右侧测试光。但是,如前所述,右侧显示组件也可以选择包括第一右瞳用于释放右侧显示光,以及第二右瞳用于释放右侧测试光
在本例中,显示组件被安置在波导的表面上,更接近用户的眼睛。在其他示例中,显示组件可以被设置在波导的相对表面与用户的眼睛相对应
与左波导402L类似,右波导700配置为耦合来自右侧显示组件的右侧显示光,并将右侧显示光耦出,以便在右视窗708查看。
这可以通过如上所述的合适衍射光学元件来实现。波导700包括第一右侧衍射光学元件710A和第二右侧衍射光学元件710B。
在图7中,头戴式显示系统还包括右侧光学传感器712,用于测量右侧测试光。与左侧光学传感器608不同,右侧光学传感器712与右侧波导耦合,而不是与右侧显示组件耦合
可以将右侧光学传感器连接到波导的任意一侧。可以将波导移到靠近用户眼睛的一侧,或者移到远离用户眼睛的另一侧。与左侧光学传感器608类似,右侧光学传感器也可以连接到右侧显示组件。在任何情况下,右侧波导700可以配置为与右侧显示光相连的右侧测试光704T,并将右侧测试光耦合出来,以便通过右侧光学传感器712进行传感
在图7中,头戴式显示系统进一步包括配置为测量右侧显示组件的方向的右侧IMU 716。可以将右侧IMU的输出与左侧IMU(的输出进行比较,以评估一个显示组件与另一个显示组件之间的潜在不对齐。
为此,在图7中,右侧IMU物理耦合到右侧显示组件。所以,当右侧显示组件的位置和/或方向发生变化时,右侧IMU可能会检测到这种变化。
同样地,头戴显示系统可以包含第二个右IMU。图7以示意的方式展示了用于测量右导向的配置。IMU 717用虚线表示,表明头戴显示系统不需要包含第二个右IMU
回到图5,在506,在靠近左侧显示组件的左侧光学传感器处测量左侧测试光。在508,在靠近右侧显示组件的右侧光学传感器处测量右侧测试光。
换句话说,如上所述,每个左右显示组件都提供各自的左侧和右侧测试光,并由各自的左侧和右侧光学传感器进行测量。举例来说,在图6中,左侧测试光602T由左侧显示组件404L提供,并由左侧光学传感器608进行测量。而在图7中,右侧显示组件702提供的右侧显示光704T则由右侧光学传感器712测量
显示组件与其相应波导之间的任何偏差,如果影响显示组件提供的显示光,这同样可能影响光学传感器处测试光的测量,从而允许头戴式显示系统的逻辑机能够检测到偏差。
相关专利:Microsoft Patent | Head-mounted display alignment assessment
相关专利:Microsoft Patent | Stereo alignment assessment for head-mounted display
微软最初于2022年2月提交了两项专利申请,分别名为“Head-mounted display alignment assessment”和“Stereo alignment assessment for head-mounted display”。这些专利申请近日被美国专利商标局公布
理论要掌握,实操不能落!以上关于《微软研究AR/VR领域,致力于解决左右眼立体图像对齐的问题》的详细介绍,大家都掌握了吧!如果想要继续提升自己的能力,那么就来关注golang学习网公众号吧!
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
385 收藏
-
383 收藏
-
330 收藏
-
261 收藏
-
321 收藏
-
250 收藏
-
117 收藏
-
312 收藏
-
496 收藏
-
199 收藏
-
334 收藏
-
200 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习