高性能模拟:基于高斯过程的驾驶场景重建技术的最新进展
来源:51CTO.COM
时间:2023-12-26 19:35:53 475浏览 收藏
对于一个科技周边开发者来说,牢固扎实的基础是十分重要的,golang学习网就来带大家一点点的掌握基础知识点。今天本篇文章带大家了解《高性能模拟:基于高斯过程的驾驶场景重建技术的最新进展》,主要介绍了,希望对大家的知识积累有所帮助,快点收藏起来吧,否则需要时就找不到了!
原标题:DrivingGaussian:用于周围动态自动驾驶场景的复合高斯点状绘制
请点击这里查看论文:https://arxiv.org/pdf/2312.07920.pdf
代码链接:https://pkuvdig.github.io/DrivingGaussian/
作者单位:北京大学谷歌研究 加州大学默塞德分校
论文思路:
本文提出 DrivingGaussian,这是一个针对动态自动驾驶场景的高效率和高效益的框架。对于具有移动物体的复杂场景,本文首先使用增量静态3D高斯 (incremental static 3D Gaussians) 顺序渐进地对整个场景的静态背景进行建模。然后,本文利用复合动态高斯图(composite dynamic Gaussian graph) 来处理多个移动物体,单独重建每个物体并恢复它们在场景中的准确位置和遮挡关系。本文进一步使用 LiDAR 先验进行 Gaussian Splatting 来重建具有更多细节的场景并保持全景一致性。DrivingGaussian 在驾驶场景重建方面优于现有方法,并能够实现具有高保真度和多相机一致性的逼真环视合成。
主要贡献:
根据本文了解,DrivingGaussian是第一个使用复合高斯飞溅技术进行大规模动态驾驶场景表示和建模的框架
引入了两个新颖的模块,包括增量静态3D高斯和复合动态高斯图。前者增量地重建静态背景,而后者则使用高斯图对多个动态物体进行建模。在激光雷达先验的辅助下,该方法有助于在大规模驾驶场景中恢复完整的几何形状
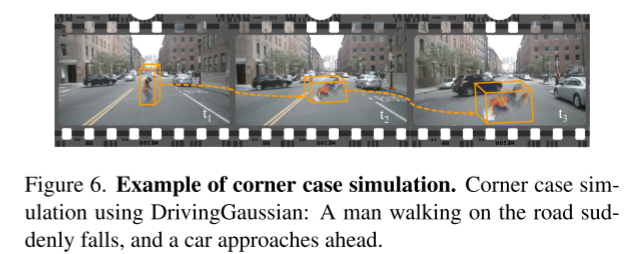
综合实验证明,DrivingGaussian在具有挑战性的自动驾驶基准测试中优于先前的方法,并且能够模拟各种极端情况以进行下游任务
网络设计:
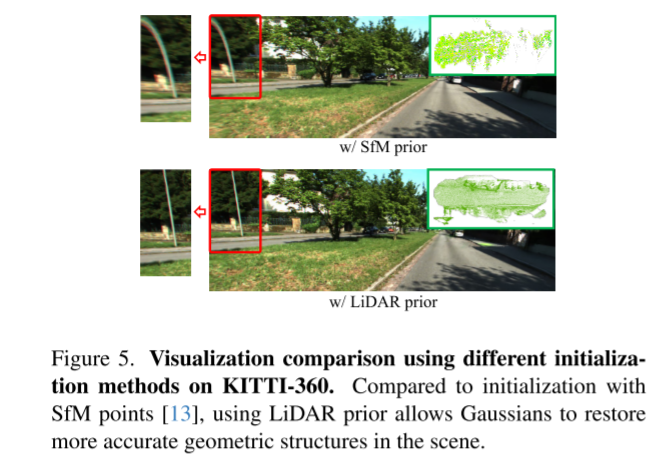
本文介绍了一种名为DrivingGaussian的新型框架,用于表示环视动态自动驾驶场景。该框架的关键思想是使用来自多个传感器的顺序数据对复杂的驾驶场景进行分层建模。通过采用Composite Gaussian Splatting技术,将整个场景分解为静态背景和动态物体,并分别对每个部分进行重建。具体而言,首先使用增量静态3D高斯方法从环视多相机视图顺序构建综合场景。然后,采用复合动态高斯图单独重建每个运动物体,并通过高斯图将它们动态地集成到静态背景中。在此基础上,通过Gaussian Splatting进行全局渲染,捕捉现实世界中的遮挡关系,包括静态背景和动态物体。此外,本文还在GS表示中引入了LiDAR先验,相比于使用随机初始化或SfM生成的点云,它能够恢复更精确的几何形状并保持更好的多视图一致性
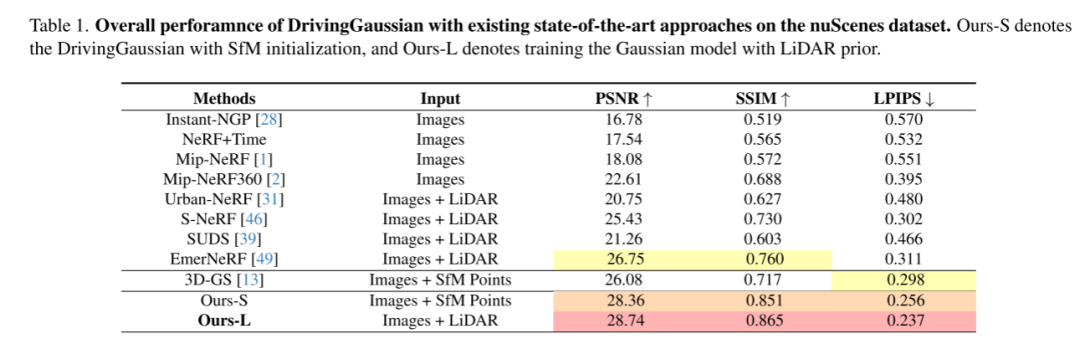
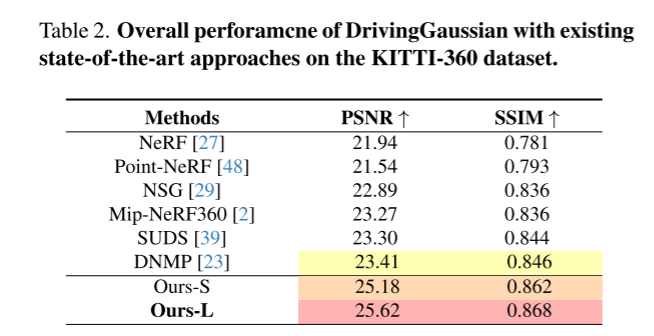
大量的实验表明,本文的方法在公共自动驾驶数据集上实现了最先进的性能。即使事先没有激光雷达,本文的方法仍然表现出良好的性能,证明了其在重建大规模动态场景方面的多功能性。此外,本文的框架支持动态场景构建和极端情况(corner case)模拟,有助于验证自动驾驶系统的安全性和鲁棒性。
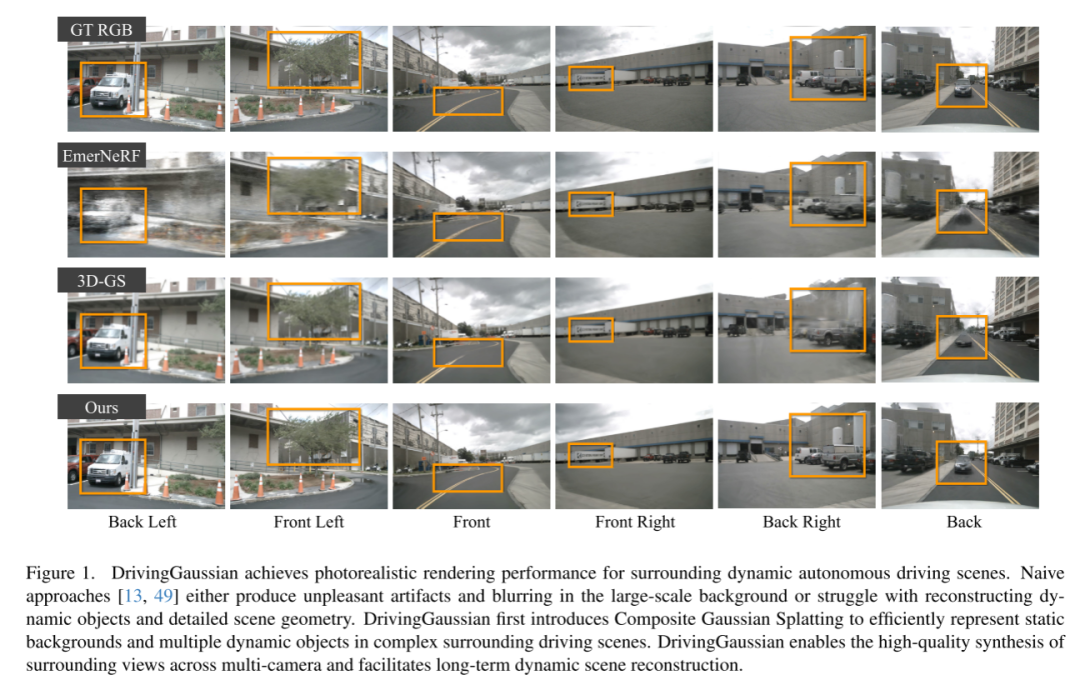
图 1. DrivingGaussian 实现了环视动态自动驾驶场景的逼真渲染性能。朴素的方法 [13, 49] 要么在大范围背景中产生 unpleasant 伪影和模糊,要么难以重建动态物体和详细的场景几何形状。DrivingGaussian 首先引入了 Composite Gaussian Splatting 来有效地表示复杂的环视驾驶场景中的静态背景和多个动态物体。DrivingGaussian 能够跨多相机高质量合成环视视图,并促进长期动态场景重建。
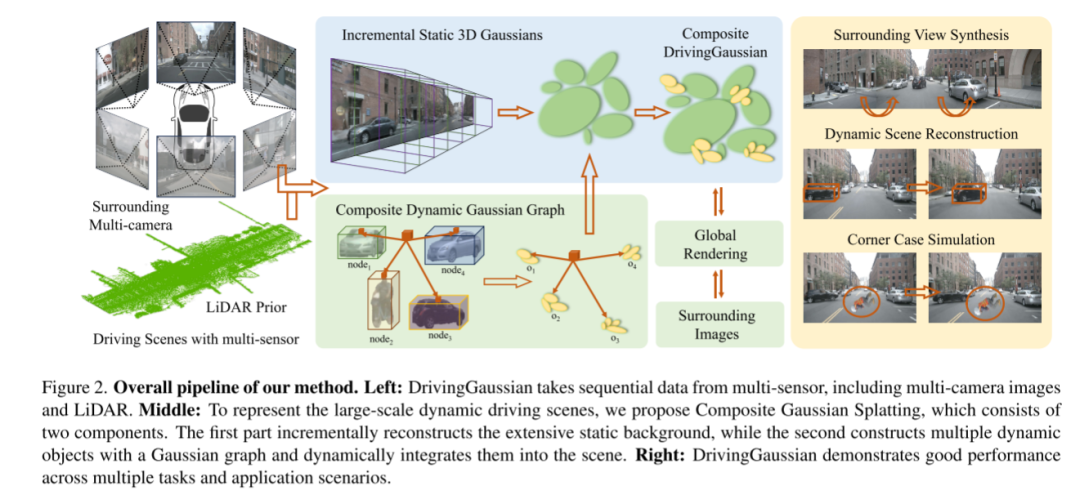
图 2.本文方法的总体流程。左:DrivingGaussian 从多传感器获取连续数据,包括多相机图像和 LiDAR。中:为了表示大规模动态驾驶场景,本文提出了 Composite Gaussian Splatting ,它由两个部分组成。第一部分增量地重建广泛的静态背景,而第二部分使用高斯图构造多个动态物体并将它们动态地集成到场景中。右图:DrivingGaussian 在多个任务和应用场景中展示了良好的性能。
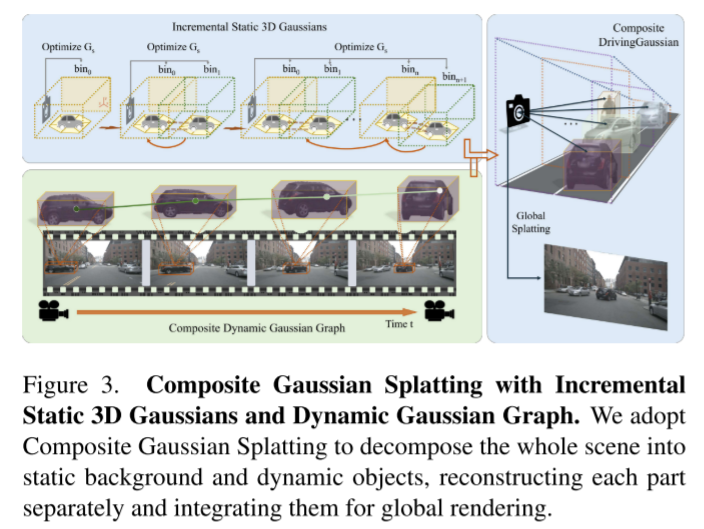
图 3. 具有增量静态3D高斯和动态高斯图的 Composite Gaussian Splatting 。本文采用 Composite Gaussian Splatting 将整个场景分解为静态背景和动态物体,分别重建每个部分并整合它们进行全局渲染。
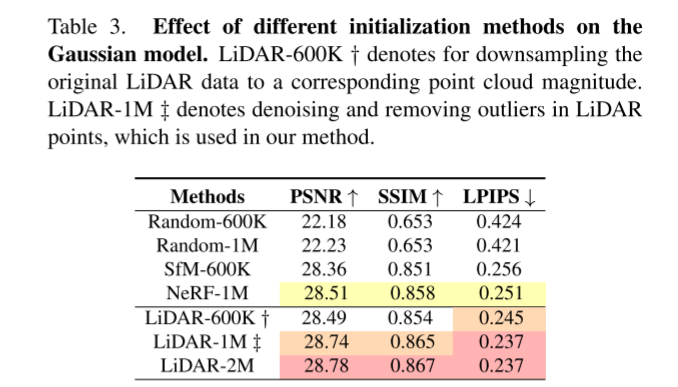
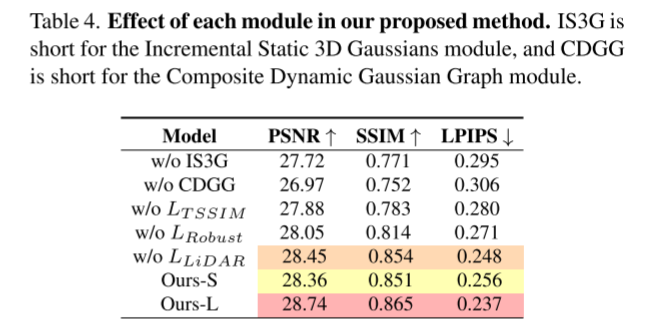
实验结果:
总结:
本文介绍了DrivingGaussian,一种基于所提出的Composite Gaussian Splatting来表示大规模动态自动驾驶场景的新颖框架。DrivingGaussian使用增量静态3D高斯逐步对静态背景进行建模,并使用复合动态高斯图捕获多个移动物体。本文进一步利用LiDAR先验来实现精确的几何结构和多视图一致性。DrivingGaussian在两个自动驾驶数据集上实现了最先进的性能,实现了高质量的环视视图合成和动态场景重建
引用:
Zhou, X., Lin, Z., Shan, X., Wang, Y., Sun, D., & Yang, M. (2023). DrivingGaussian: Composite Gaussian Splatting for Surrounding Dynamic Autonomous Driving Scenes. ArXiv. /abs/2312.07920

原文链接:https://mp.weixin.qq.com/s/p1J20g0kVUG6kVpq_SEgxQ
理论要掌握,实操不能落!以上关于《高性能模拟:基于高斯过程的驾驶场景重建技术的最新进展》的详细介绍,大家都掌握了吧!如果想要继续提升自己的能力,那么就来关注golang学习网公众号吧!
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
501 收藏
-
202 收藏
-
科技周边 · 人工智能 | 19小时前 | API · go · 人工智能 · 工程实践 · 工具调用 · Go Anthropic Messages API tool_use tool_result Claude工具调用368 收藏
-
243 收藏
-
195 收藏
-
186 收藏
-
333 收藏
-
419 收藏
-
280 收藏
-
科技周边 · 人工智能 | 4天前 | 异步任务 · 人工智能 · jsonl · AI工程化 · Batch API · 结果对账 · JSONL 大模型批量任务 OpenAI Batch API custom_id AI 离线处理 结果对账113 收藏
-
149 收藏
-
432 收藏
-
科技周边 · 人工智能 | 5天前 | 安全 · oauth · 人工智能 · mcp · 工具调用 · MCP 401 MCP 403 MCP OAuth mcp resource_metadata MCP scope MCP token audience443 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习