Go 并发读写 map 怎么选:map+RWMutex、sync.Map、分片 map 对比
来源:17golang原创
时间:2026-07-01 13:07:36 244浏览 收藏
Go 里普通 map 不是并发安全容器。只要有多个 goroutine 同时读写同一个 map,就应该主动设计同步策略。问题是:到底用 map + sync.RWMutex、直接用 sync.Map,还是自己做分片 map?这篇按问答方式给一个实用结论:默认先选 map + RWMutex;读多写少、键分布比较均匀时考虑 sync.Map;写入很热、单锁竞争明显时再上分片。
Go 官方 sync.Map 文档也提醒:sync.Map 是专门化类型,多数代码仍应使用普通 Go map 搭配单独的锁或协调机制。理解这个边界,比记住某个固定答案更重要。
- 使用场景:问题到底出在哪
- 候选方案:map+RWMutex、sync.Map、分片 map
- 对比维度:读写比例、热点键和维护成本
- 推荐选择:先简单,再按压力升级
- 不适用情况:别把 sync.Map 当万能容器
- 决策表:一眼选方案
- 总结
使用场景:问题到底出在哪
很多 Go 问答里会出现类似问题:我有一个全局缓存、连接状态表、配置快照或统计计数表,多个 goroutine 都要访问它,应该用哪种 map?先把场景拆清楚:
- 读多写少:初始化或偶尔刷新,绝大多数请求只是读取。
- 读写均衡:业务请求既读又改,更新频率不低。
- 热点写入:少数 key 被频繁更新,例如某个租户、某个任务 ID、某个计数项。
- 维护优先:团队更需要清晰类型、简单调试和可控生命周期。
方案选择不是看名字高级不高级,而是看锁竞争、键分布、类型安全和后续维护成本。
候选方案:map+RWMutex、sync.Map、分片 map
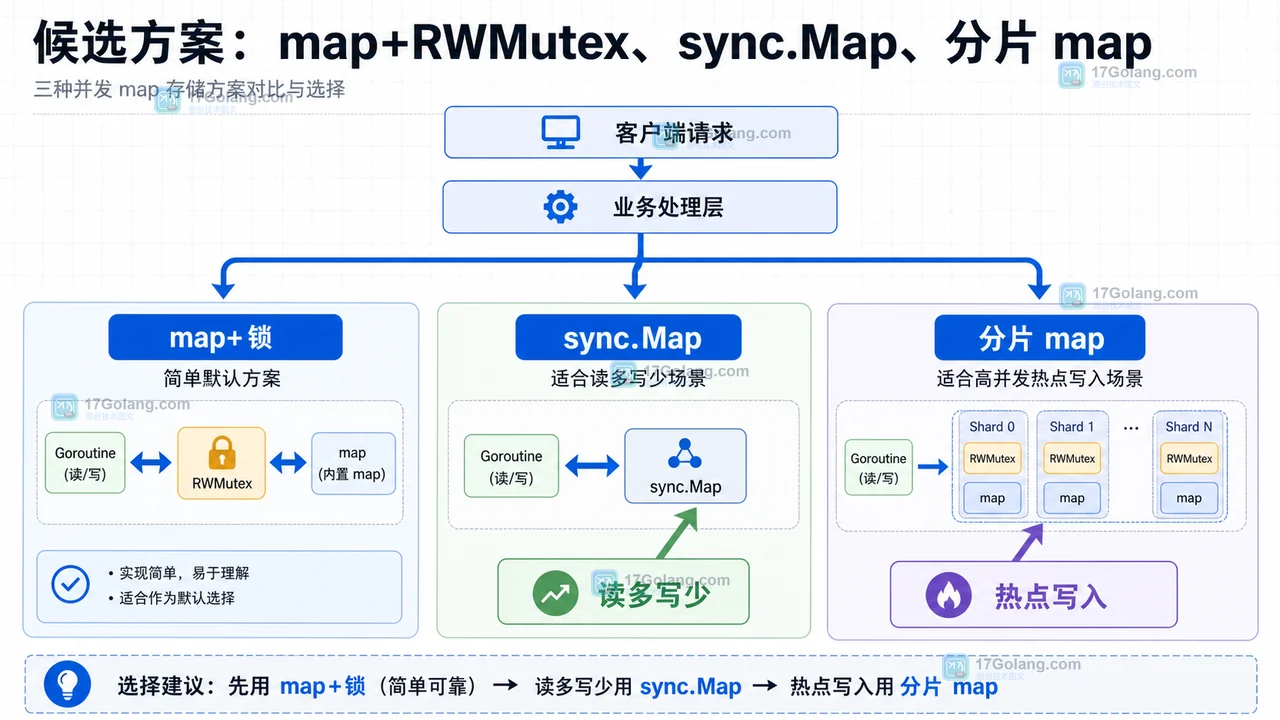
方案一:map + sync.RWMutex
这是最常见、最容易审查的方案。读操作用 RLock,写操作用 Lock,数据结构保持强类型:
type UserCache struct {
mu sync.RWMutex
data map[int64]User
}
func (c *UserCache) Get(id int64) (User, bool) {
c.mu.RLock()
defer c.mu.RUnlock()
user, ok := c.data[id]
return user, ok
}
func (c *UserCache) Set(id int64, user User) {
c.mu.Lock()
defer c.mu.Unlock()
c.data[id] = user
}
它的优点是类型清楚、生命周期可控、删除和遍历都符合普通 map 直觉。缺点是所有 key 共用一把锁,写入频繁时容易成为竞争点。
方案二:sync.Map
sync.Map 内置并发访问能力,适合两类典型场景:某个 key 写入一次后被多次读取;或者多个 goroutine 操作的 key 集合相对独立。它的 API 是 Load、Store、LoadOrStore、Delete 等:
var cache sync.Map
func Save(id int64, user User) {
cache.Store(id, user)
}
func Find(id int64) (User, bool) {
value, ok := cache.Load(id)
if !ok {
return User{}, false
}
user, ok := value.(User)
return user, ok
}
它的问题也明显:value 需要类型断言,复杂更新逻辑不如普通 map 直观;如果你需要频繁遍历、批量替换、维护多个字段的一致性,代码反而会绕。
方案三:分片 map
分片 map 是把一张大 map 拆成多个小 map,每个分片有自己的锁。访问时先根据 key 计算分片下标,再锁定对应分片:
const shardCount = 32
type shard struct {
mu sync.RWMutex
data map[string]int64
}
type CounterMap struct {
shards [shardCount]shard
}
func (m *CounterMap) pick(key string) *shard {
h := fnv32(key)
return &m.shards[h%shardCount]
}
分片适合高并发写入或 key 空间很大的场景。它的代价是实现复杂度上升:分片数量怎么选、遍历怎么做、扩容怎么处理、指标怎么观察,都要自己承担。
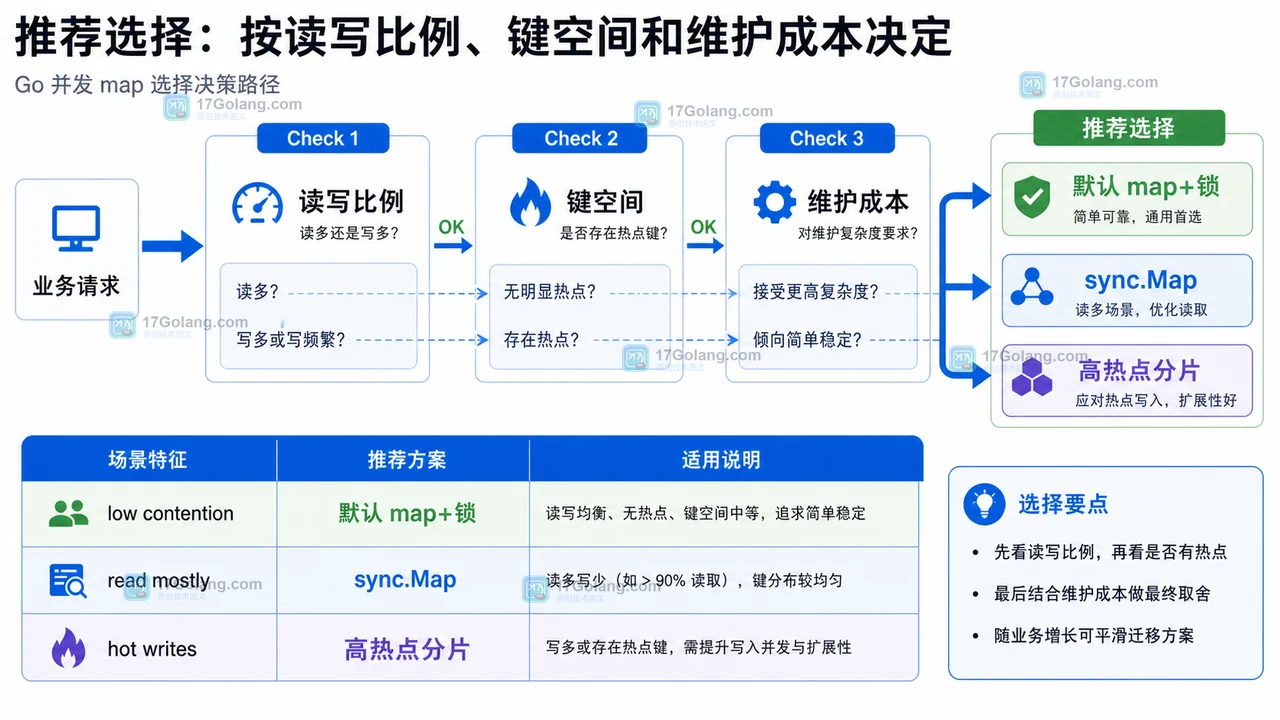
对比维度:读写比例、热点键和维护成本
选择时可以先问三个问题。
- 读写比例:读远多于写吗?如果是,
RWMutex或sync.Map都可能合适;如果写也很多,要看锁竞争。 - 键空间:请求是否集中在少数热点 key?热点明显时,单锁和
sync.Map都可能被写入路径拖慢。 - 维护成本:团队是否能接受类型断言和自定义分片逻辑?如果不能,先用普通 map 加锁。
推荐选择:先简单,再按压力升级
我的推荐顺序是:
- 业务刚开始:先用
map + RWMutex,因为它最清楚,也最容易加日志和测试。 - 读多写少且 key 分布均匀:尝试
sync.Map,尤其适合缓存对象、只增不常改的元数据。 - 写入竞争明显:先用压测或指标确认单锁等待,再考虑分片 map。
- 需要多字段一致性:不要只看 map 容器,可能应该把状态收敛到一个拥有者 goroutine、数据库事务或更清晰的状态机里。
不适用情况:别把 sync.Map 当万能容器
sync.Map 不是“更高级的 map”。下面几种情况要谨慎:
- 你需要强类型 API,并希望编译期尽量发现错误。
- 你经常要遍历全量数据并做一致性判断。
- 每次更新都依赖旧值和多个字段的组合状态。
- key 很少但写入极热,此时分片也未必能解决热点,需要重新设计写入路径。
另外,Go 的 内存模型强调同步操作之间的可见性关系。不要用“我测试没问题”代替同步设计;并发读写共享数据时,必须有明确的同步边界。
决策表:一眼选方案
| 场景 | 优先方案 | 理由 |
|---|---|---|
| 读写都不高,维护优先 | map + RWMutex | 简单、强类型、容易排查 |
| 读很多,写很少,key 分布均匀 | sync.Map | 减少手写锁代码,适合专门化读多场景 |
| 写入较多,key 空间大 | 分片 map | 把锁竞争拆散到多个分片 |
| 单个热点 key 被频繁更新 | 重新设计写入路径 | 换容器不一定能解决热点本身 |
| 需要批量一致性和复杂状态 | map + 锁或状态拥有者 | 同步边界更清楚 |
总结
Go 并发 map 的选择可以记成一句话:默认 map + RWMutex,读多写少看 sync.Map,高写入竞争再考虑分片。真正做决定前,先用业务读写比例和 key 分布说话,再用压测或运行指标确认瓶颈。这样选出来的方案通常不会最花哨,但会更稳、更容易长期维护。
-
100 收藏
-
101 收藏
-
101 收藏
-
101 收藏
-
101 收藏
-
Golang · Go问答 | 1小时前 | HTTP · net/http · Go问答 · 流式响应 · ResponseController · net/http FLUSH 流式响应 Go问答 ResponseController FullDuplex 写超时161 收藏
-
Golang · Go问答 | 1小时前 | HTTP · sse · Go问答 · 用户体验 · 流式响应 · Go EventSource SSE Go问答 Server-Sent Events 长任务进度 http.Flusher293 收藏
-
Golang · Go问答 | 2小时前 | Timer · 性能优化 · time.After · Go问答 · Go 内存优化 Timer time.After Go问答 time.NewTimer Go1.23384 收藏
-
Golang · Go问答 | 4小时前 | go · Context · 并发编程 · 接口超时 · 超时控制 goroutine泄漏 WithTimeout Go context Go问答 CancelFunc477 收藏
-
445 收藏
-
Golang · Go问答 | 1天前 | 连接池 · 性能排查 · database/sql · Go问答 · Go 连接池 DBStats sql.DB WaitCount SetMaxOpenConns214 收藏
-
388 收藏
-
Golang · Go问答 | 2天前 | go语言 · HTTP客户端 · Go问答 · 连接复用 · 排查清单 · net/http 连接复用 HTTP响应体 Go问答 resp.Body.Close 排查清单452 收藏
-
Golang · Go问答 | 3天前 | JSON · 接口设计 · Go问答 · nil slice · Go 接口兼容 json.Marshal nil slice empty slice 数组字段305 收藏
-
368 收藏
-
Golang · Go问答 | 2星期前 | map · RWMutex · sync.Map · go并发 · Go问答 · Go channel map 并发读写 Fatal error RWMutex sync.Map379 收藏
-
153 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 立即学习 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 立即学习 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 立即学习 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 立即学习 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 立即学习 485次学习