-

Context.WithValue会掩盖参数来源,使调用链变成难以追踪的“黑盒”;它应仅用于传递请求元数据(如traceID),而非业务参数,且key必须为私有类型、取值需双判断,避免panic和性能损耗。
-
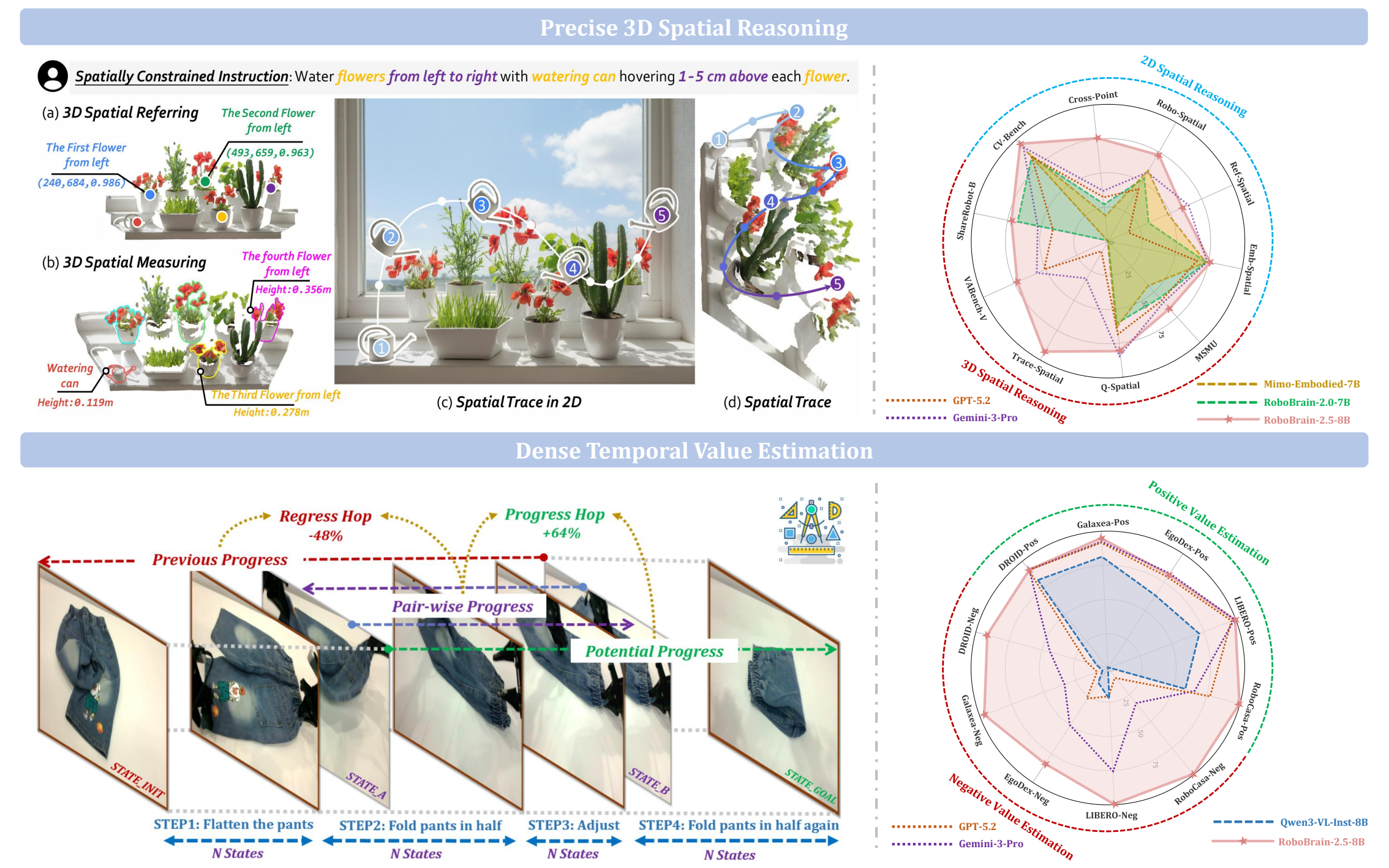
智源研究院正式推出全新一代具身智能基础模型——RoboBrain2.5,直面具身智能长期存在的“空间感知不准”与“执行过程不稳”两大核心挑战。该模型依托大规模、高精度的时空联合监督训练,在真实物理世界交互能力上实现双重关键突破:高保真3D空间推理:将二维视觉输入精准映射至真实尺度下的可执行运动轨迹,显著提升机器人操作的定位精度与动作稳定性,真正实现“抓得准、放得稳”;细粒度时序价值评估:在任务执行过程中持续建模状态进展与潜在风险,支撑长周期、强动态场景下的自主决策调整与闭环容错恢复。作为RoboBrain
-

豆包AI官方入口为https://www.doubao.com/chat/,支持免注册对话、多模态输入、图像生成、跨设备协同、DeepSeekR1模型响应及优化交互设计。
-

可关闭百度搜索热搜中的AI内容,方法包括:一、在搜索设置中关闭“AI热点聚合”;二、用AdGuard插件屏蔽“AI解读”标签;三、在隐私设置中禁用AI热点推荐权限;四、使用无痕模式临时规避;五、修改hosts文件阻断AI接口。
-
ThinkPHP调试需优先检查.env中APP_DEBUG配置,确保其为true且文件位于根目录;Apache需启用mod_rewrite;自定义异常处理器应调用parent::render()保留堆栈;SQL日志需开启trace/log_sql并保证runtime可写。
-
Windows下is_readable()无法判断隐藏文件,因其不检查FILE_ATTRIBUTE_HIDDEN属性;应改用attrib命令或COM对象检测,Linux/macOS则依赖文件名以点开头的约定。
-
确保客户端与服务端HTML结构一致,避免因环境差异导致重新渲染;2.通过async/await预取数据并注入初始状态,保证数据同步;3.使用hydrate而非render进行事件绑定,确保交互正常;4.服务端提取样式并内联,防止客户端重排重绘。
-

CyclicBarrier是Java中用于多线程在屏障点同步的工具,当指定数量的线程都调用await()后,所有线程被释放继续执行,且可重复使用;常用于并行计算、性能测试等场景,支持屏障动作和异常处理,通过reset()可重置状态。
-
PHP通过生成带签名和过期时间的临时视频URL(如60–120秒)、校验合法性并限流防刷,配合前端监听videoerror事件实现可控重试闭环。
-
通过CSSFlexbox的align-items:stretch特性,可让同级卡片自动拉伸至容器内最高卡片的高度,无需固定高度或JavaScript计算,简洁高效地实现响应式等高布局。
-
2.0升排量发动机马力需据类型推断:自然吸气型多为140–180马力,涡轮增压型主流190–265马力,高性能特例可达421马力;升功率法可反推,如85PS/L对应170马力。
-

Runtime类是JVM单例门面,仅支持exec()执行命令、gc()建议回收、addShutdownHook()注册关闭钩子等有限操作,无法配置JVM参数,现代开发应优先使用ProcessBuilder、ManagementFactory等替代API。
-

1英里等于1.609344公里,换算时可按1英里≈1.61公里速算,1公里≈0.62英里;国际标准中1英里=1609.344米,1公里=1000米。
-

Go中指针本身不并发安全,需保护被指针访问的底层数据;多goroutine读写同一变量须用锁、原子操作或channel;atomic.Value适合写少读多的指针发布场景。
-

返回值是函数执行后的结果,如数字、字符串等;返回函数则是将未执行的函数作为对象返回,后续可调用。例如,add(3,4)返回7是返回值;get_multiplier(2)返回multiply函数本身,之后通过double(5)执行,体现函数式编程核心概念。